All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(1498 Produkte verfügbar)


























 Ready to Ship
Ready to Ship














































 Ready to Ship
Ready to Ship




































 Ready to Ship
Ready to Ship




 Ready to Ship
Ready to Ship


























 Ready to Ship
Ready to Ship
























































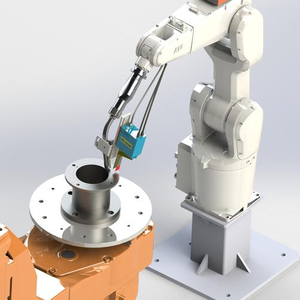
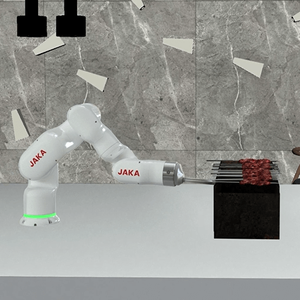
Sechs-Achsen-Roboter sind in industriellen Anwendungen von entscheidender Bedeutung aufgrund ihrer Vielseitigkeit und Präzision. Sie sind unerlässlich für Aufgaben wie Schweißen, Montage, Materialhandhabung und Lackierung. Die Sechs-Achsen-Roboter verfügen über Arme, die eine volle Rotation und Bewegung ermöglichen. Dies macht sie ideal für Aufgaben, die Präzision und Flexibilität erfordern. Die Programmierung von Sechs-Achsen-Robotern umfasst das Lehren eines Roboters, wie er spezifische Aufgaben unter Verwendung verschiedener Methoden und Ansätze ausführen kann. Es gibt verschiedene Arten der Programmierung von Sechs-Achsen-Robotern, einschließlich;
Programmierung über das Teach Pendant
Die Programmierung über das Teach Pendant ist die häufigste Methode, die bei der Programmierung von Sechs-Achsen-Robotern verwendet wird. Dabei kommt ein tragbares Gerät mit einem Bildschirm und Tasten zum Einsatz, das als Teach Pendant bekannt ist. Mit dieser Methode verwenden Programmierer das Teach Pendant, um einen Roboter zu programmieren, indem sie dessen Endeffektor manuell zu den gewünschten Positionen führen. Das Teach Pendant wird verwendet, um Positionen einzugeben, Wege zu erstellen und Befehle zu definieren. Diese Methode eignet sich für Anwendungen, die Anpassungen und eine niedrige Produktionsmenge erfordern.
Offline-Programmierung
Die Offline-Programmierung umfasst die Entwicklung der Programme, wenn der Roboter nicht verwendet wird. Dies geschieht an einem Computerterminal unter Verwendung von Simulationssoftware. Die Software bietet eine virtuelle Umgebung, in der Benutzer Roboter modellieren, Arbeitszellen erstellen und Roboter programmieren können. Diese Methode ist ideal für komplexe Anwendungen und während der Installationsphase. Sie ermöglicht zudem das Testen und Debuggen des Programms, bevor es auf den Roboter hochgeladen wird. Dadurch wird sichergestellt, dass es während des Betriebs des Roboters zu keinen Fehlern kommt.
Grafische Programmierung
Die grafische Programmierung verwendet visuelle Schnittstellen, um Benutzern zu ermöglichen, Roboterprogramme durch Ziehen und Ablegen von Blöcken oder Symbolen zu erstellen. Diese Methode ähnelt der Offline-Programmierung, erfordert jedoch kein detailliertes Wissen über Programmierung. Sie eignet sich für Benutzer, die mit den Programmiersprachen für Roboter weniger vertraut sind. Die Methode vereinfacht den Programmierungsprozess durch intuitive visuelle Darstellungen der Programmierfunktionen.
Script-basierte Programmierung
Die script-basierte Programmierung verwendet textbasierte Programmiersprachen zur Programmierung von Robotern. Zu den gängigen Sprachen gehören Python, C++ und Java. Die script-basierte Programmierung ist flexibel und leistungsstark und eignet sich für fortgeschrittene Benutzer, die das Verhalten des Roboters anpassen möchten. Sie ermöglicht eine einfache Integration mit anderer Software und Systemen, was sie ideal für komplexe und automatisierte Aufgaben macht.
Beim Kauf von 6-Achsen-Roboterprogrammierungen sollten Geschäftsinhaber das Programmierwissen von Anfängern berücksichtigen. Sie sollten Roboter wählen, die einfach zu programmieren sind, damit Schulen und Bildungseinrichtungen sie problemlos nutzen können. Käufer sollten auch die Programmiersprachen betrachten, die in den Robotern verwendet werden. Sie sollten Roboter wählen, die gängige Sprachen wie Python, C++ oder Java verwenden. Dies ermöglicht eine einfache Integration mit anderen Systemen und Werkzeugen. Darüber hinaus sollten Geschäftsinhaber Roboter mit vielseitigen Programmierschnittstellen erwerben. Solche Schnittstellen umfassen grafische Benutzeroberflächen, Kommandozeilenoberflächen und Teach Pendant-Schnittstellen. Dadurch haben die Benutzer die Möglichkeit, je nach ihren Fähigkeiten und Vorlieben auszuwählen.
Um das Lernerlebnis zu verbessern, sollten Käufer Roboter auswählen, die Simulationen und virtuelle Umgebungen unterstützen. Damit können die Benutzer ihre Programme in einer simulierten Umgebung testen und debuggen, bevor sie sie auf den Roboter hochladen. Darüber hinaus sollten Geschäftsinhaber Roboter wählen, die verschiedene Programmiermodi anbieten. Einige Roboter sollten sowohl manuelle als auch automatische Programmiermodi erlauben. Dies ermöglicht es den Benutzern, in ihrem eigenen Tempo zu lernen und bei Bedarf zwischen den Modi zu wechseln. Außerdem sollten Käufer Roboter kaufen, die schrittweise Programmieranleitungen und Tutorials anbieten. Zudem sollten sie Roboter mit detaillierter Dokumentation erhalten, die alle Aspekte der Programmierung des Roboters abdeckt.
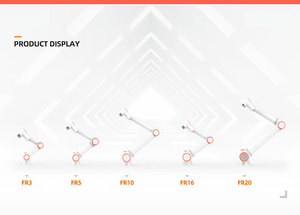
Geschäftsinhaber sollten Roboter mit einer Gemeinschaft und Unterstützung darauf erwerben. Dies ermöglicht es den Benutzern, Hilfe bei Herausforderungen zu suchen. Noch wichtiger ist, um den unterschiedlichen Bedürfnissen der Benutzer gerecht zu werden, sollten Käufer Roboter mit unterschiedlichen Tragfähigkeiten wählen. Sie sollten außerdem Roboter wählen, die leicht erweiterbar und aufrüstbar sind. Solche Roboter ermöglichen es den Benutzern, neue Funktionen oder Module hinzuzufügen, während sich ihre Programmierkenntnisse weiterentwickeln.
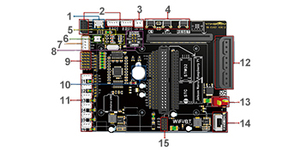
Bevor man sich mit den Details der Programmierung von 6-Achsen-Robotern beschäftigt, ist es auch wichtig, die Funktionen, Merkmale und das Design von Roboterarmen zu kennen. Dieses Wissen hilft, besser zu verstehen, wie man diese Maschinen für verschiedene Aufgaben steuert und programmiert.
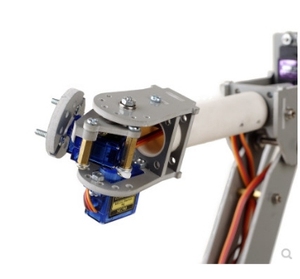
Das Design eines 6-Achsen-Roboterarms besteht aus einer Basis, Gelenken, Verbindungen, einem Endeffektor und einem Steuerungssystem. Der 6-Achsen-Roboter hat eine stabile rechteckige Basis, die am Boden befestigt ist. Sie stützt den gesamten Roboterarm und bietet ihm Stabilität. Das Basisgelenk ist das erste Gelenk, das den Arm mit seiner Basis verbindet. Es ermöglicht dem Arm, sich in einer kreisförmigen Bewegung zu drehen.
Verbindungen sind die Abschnitte des Arms zwischen den Gelenken und sind von zwei Arten: primär und sekundär. Primäre Verbindungen verbinden die Basis direkt mit dem Endeffektor. Sie sind die Hauptbestandteile des Roboterarms. Sekundäre Verbindungen verbinden die primären Verbindungen mit dem Endeffektor. Gelenke ermöglichen die rotatorische oder lineare Bewegung zwischen den Verbindungen.
Der Endeffektor befindet sich an der Spitze des Arms und führt alle Aufgaben aus. Er kann ein Greifer, Schweißer, Saugbecher oder ein anderes Werkzeug sein, je nach der Arbeit, die der Roboter verrichten wird. Ein Steuerungssystem ist das Gehirn des Roboters. Es empfängt Befehle vom Bediener und sendet Signale an den gesamten Roboter, um die erforderliche Aufgabe auszuführen.
6-Achsen-Roboterarme haben einige Merkmale, die sie für verschiedene Anwendungen geeignet machen. Beispielsweise haben die meisten Roboterarme einen Bewegungsbereich, der über sechs Achsen hinausgeht. Sie verfügen über mehr Gelenke und Achsen, die es ihnen ermöglichen, sich in verschiedene Richtungen zu drehen und zu bewegen. Einige Roboter haben auch flexible Arme, die aus weichen Materialien gefertigt sind. Sie können sich leicht biegen und dehnen, ohne die inneren Drähte zu beschädigen.
Sechs-Achsen-Roboter sind programmierbar, was bedeutet, dass man sie programmieren kann, um spezifische Aufgaben auszuführen. Die Art der verwendeten Programmierung hängt vom Modell des Roboters ab. Einige haben eine manuelle Programmierung, während andere das Teach Pendant, Programmierungssoftware und Code-Schreiben verwenden. Sie verfügen auch über verschiedene Sensoren, die ihnen helfen, Hindernisse zu erkennen und zu vermeiden. Dies macht sie sicher im Umgang mit Menschen.
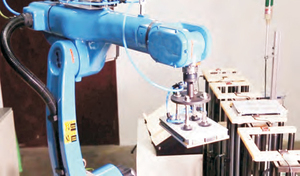
Ein Hauptgrund, warum Menschen 6-Achsen-Roboter verwenden, ist die Automatisierung. Automatisierung bedeutet, Maschinen zu verwenden, um Aufgaben zu erledigen, die früher von Menschen durchgeführt wurden. 6-Achsen-Roboter helfen, Prozesse in verschiedenen Branchen zu automatisieren, wodurch diese effizienter, genauer und kosteneffektiver werden. Zudem reduzieren sie das Risiko von Verletzungen und Ermüdung, die mit manueller Arbeit verbunden sind.
Sechs-Achsen-Roboter werden umfangreich in Bereichen wie Fertigung, Gesundheitswesen und Erkundung eingesetzt. Um die Sicherheit dieser Roboter zu gewährleisten, ist es wichtig, sowohl physische als auch operationale Sicherheitsaspekte zu berücksichtigen.
Physische Sicherheit beinhaltet den Schutz menschlicher Bediener und der Umwelt vor potenziellen Gefahren, die vom Roboter ausgehen. Dazu gehört die Verhinderung von Unfällen wie Kollisionen, Quetschungen und Verletzungen durch das Design von Robotern mit Sensoren, weichen Materialien und Sicherheitsbarrieren. Darüber hinaus kann eine angemessene Wartung und Inspektion der Roboter mechanische Ausfälle verhindern, die Schaden verursachen können.
Operationale Sicherheit konzentriert sich darauf, sicherzustellen, dass der Roboter während seiner Aufgaben und der Programmierung sicher funktioniert. Dies beinhaltet die Verhinderung von Fehlern und Fehlfunktionen, die zu Unfällen führen können, durch die Implementierung strenger Tests, Validierung und Verifikation der Roboter-Software und -Hardware. Zudem kann die Erstellung von Standards und Richtlinien für die Programmierung von Robotern, wie beispielsweise das Robot Operating System (ROS), Entwicklern helfen sicherzustellen, dass Sicherheit in den Design- und Entwicklungsprozess integriert ist.
Die Qualität der Programmierung von industriellen 6-Achsen-Robotern ist ein entscheidender Faktor, der die Leistung, Effizienz und Zuverlässigkeit von robotergestützten Systemen in verschiedenen Industrien beeinflusst. 6-Achsen-Roboter sind äußerst flexibel und in der Lage, komplexe Aufgaben wie Schweißen, Lackieren, Montage, Verpackung und Materialhandhabung auszuführen. Um sicherzustellen, dass die Roboterprogrammierung den Qualitätsstandards entspricht, müssen mehrere Schlüsselaspekte berücksichtigt werden.
Eine der Hauptüberlegungen ist die Genauigkeit und Präzision der robotergestützten Bewegungen. Dies erfordert eine sorgfältige Kalibrierung und Anpassung der Gelenke, Sensoren und Steuerungen des Roboters, um sicherzustellen, dass er seine Aktionen mit hoher Konsistenz wiederholen kann. Jede Abweichung oder Fehler in der Positionierung des Roboters kann zu Mängeln in der Qualität der Arbeit, erhöhtem Abfall und verringerter Produktivität führen.
Ein weiterer wichtiger Aspekt ist die Optimierung der Programmiercodes und Algorithmen. Dies beinhaltet die Verwendung effizienter Programmiersprachen und Techniken, die die Geschwindigkeit und Reaktionsfähigkeit der Roboteroperationen verbessern können. Darüber hinaus kann der Einsatz von Simulations- und Modellierungswerkzeugen helfen, die Leistung des Roboters zu testen und zu validieren, bevor er in der realen Umgebung eingesetzt wird.
Q1: Wie wird ein 6-Achsen-Roboter programmiert?
A1: Ein 6-Achsen-Roboter wird durch eine Kombination von Lehrmethoden programmiert, bei denen Bediener den Roboter manuell steuern und Programmiersprachen wie RAPID, KRL oder Python verwenden.
Q2: Was sind die Anwendungen von 6-Achsen-Robotern?
A2: 6-Achsen-Roboter werden in verschiedenen Anwendungen in unterschiedlichen Branchen eingesetzt, wie z. B. Fertigung, Elektronik, Automobilindustrie, Gesundheitswesen, Nahrungsmittel und Getränke, Logistik und mehr.
Q3: Was sind die Arten der Programmierung von 6-Achsen-Robotern?
A3: Es gibt drei Haupttypen der Programmierung von 6-Achsen-Robotern: Durchführen-Programmierung, textbasierte Programmierung und Offline-Programmierung.
Q4: Was sind die Vorteile der Verwendung von 6-Achsen-Robotern?
A4: Sechs-Achsen-Roboter bieten Vorteile wie hohe Präzision, Flexibilität, erhöhte Effizienz, verbesserte Sicherheit und Kosteneffektivität in verschiedenen industriellen Anwendungen.
Q5: Wie gewährleisten 6-Achsen-Roboter die Sicherheit?
A5: Sechs-Achsen-Roboter verbessern die Sicherheit durch fortschrittliche Funktionen wie Sensoren, Sichtsysteme und Compliance-Algorithmen, die Gefahren erkennen und Kollisionen verhindern.