
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(88 Produkte verfügbar)





 Sofort lieferbar
Sofort lieferbar























 Sofort lieferbar
Sofort lieferbar















 Sofort lieferbar
Sofort lieferbar









 Sofort lieferbar
Sofort lieferbar




 Sofort lieferbar
Sofort lieferbar
























 Sofort lieferbar
Sofort lieferbar




 Sofort lieferbar
Sofort lieferbar









 Sofort lieferbar
Sofort lieferbar




 Sofort lieferbar
Sofort lieferbar


















 Sofort lieferbar
Sofort lieferbar








 Sofort lieferbar
Sofort lieferbar













 Sofort lieferbar
Sofort lieferbar








 Sofort lieferbar
Sofort lieferbar



 Sofort lieferbar
Sofort lieferbar









 Sofort lieferbar
Sofort lieferbar



 Sofort lieferbar
Sofort lieferbar




 Sofort lieferbar
Sofort lieferbar



 Sofort lieferbar
Sofort lieferbarEs gibt zwei Arten von Arduino Steuer Servo 180 Grad, die unten aufgeführt sind:
Standard Servo:
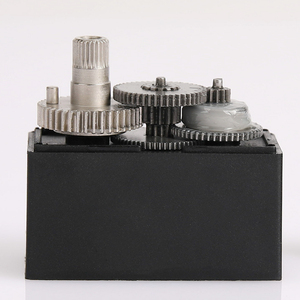
Ein Standardservo, auch bekannt als RC-Servo, ist ein kleiner Motor mit einem Getriebe und einer Elektronik in einer Einheit. Er wird häufig in ferngesteuerten Autos, Flugzeugen und Drohnen eingesetzt. Dieses Servomodell kann so gesteuert werden, dass es sich bis zu 180 Grad dreht. Es verwendet PWM (Pulsweitenmodulation) Signale, um den Winkel zu bestimmen, in dem sich der Motor drehen soll. Der Standardservomotor ist weit verbreitet, da er kostengünstig und bei Hobbyisten beliebt ist.
Kontinuierlicher Rotationsservo:
Diese Art von Servo unterscheidet sich von einem Standardservo, da er sich kontinuierlich in beide Richtungen drehen kann. Er ist nicht auf einen bestimmten Drehwinkel beschränkt. Der kontinuierliche Rotationsservo ist ideal für Anwendungen, die erfordern, dass sich der Motor ununterbrochen dreht, wie etwa Räder in einem Roboter. Ein Potentiometer ist nicht an diesen Servo angeschlossen, was bedeutet, dass PWM-Signale stattdessen die Drehgeschwindigkeit und -richtung steuern.
Der Arduino Steuer Servo 180 Grad hat einige gemeinsame Merkmale, darunter:
Pulsweitenmodulation (PWM)
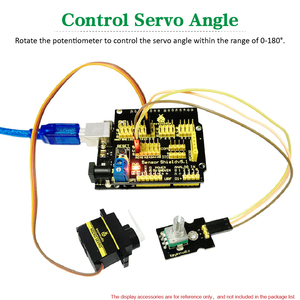
Der Arduino sendet ein PWM-Signal, um den Winkel des Servomotors zu steuern. Das Signal hat eine variable Pulsbreite. Die Breite des Pulses kodiert die gewünschte Winkelposition des Servomotors. Der Servomotor liest das PWM-Signal und bewegt sich in den Winkelbereich von 0 bis 180 Grad. Das PWM-Signal hilft, eine präzise Kontrolle über die Position des Servomotors zu gewährleisten.
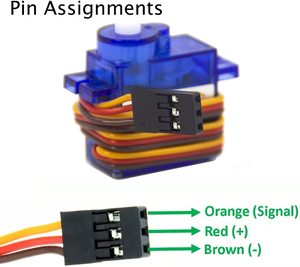
Steuerpins
Der Arduino-Steuer-Servomotor hat Steuerpins, die verwendet werden, um den Servomotor an die Arduino-Platine anzuschließen. Die Steuerpins empfangen das PWM-Signal vom Arduino. Sie helfen, die Position des Motors zu bestimmen. Die Steuerpins stellen sicher, dass die Arduino-Platine eine genaue und effiziente Kontrolle über den Servomotor hat.
Stromversorgung
Der Servomotor benötigt eine Stromversorgung, die die notwendige Spannung und den notwendigen Strom liefert. Dies ermöglicht dem Motor, ordnungsgemäß und effizient zu arbeiten. Die Stromversorgung stellt sicher, dass der Servomotor in die gewünschte Winkelposition bewegen kann, wie vom Arduino-Board vorgegeben.
Rückmeldemechanismus
Der Rückmeldemechanismus ist ein entscheidendes Merkmal des Arduino Steuer Servos. Er erlaubt es dem Servomotor, die Winkelposition zu erkennen. Dies hilft, die Position der Ausgangswelle zu bestimmen. Der Rückmeldemechanismus stellt sicher, dass die Ausgangswelle in die gewünschte Winkelposition bewegt wird. Er bietet Präzision und Genauigkeit in der Steuerung des Servomotors.
Hohe Drehmomentausgabe
Dieses Merkmal ermöglicht es dem Servomotor, eine starke Ausgabe zu haben und diese mit hoher Präzision zu steuern. Dadurch kann der Servomotor schwere Lasten bewegen. Er kann sie auch in die gewünschte Winkelposition von 180 Grad bewegen. Das Merkmal der hohen Drehmomentausgabe trägt dazu bei, den Servomotor in Anwendungen effizienter zu machen, die präzises Positionieren bei zusätzlichem Widerstand erfordern.
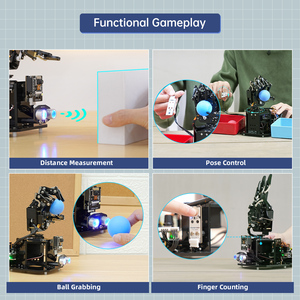
Der Arduino Servomotor wird in zahlreichen Anwendungen eingesetzt. Die folgenden sind einige der häufigsten Szenarien:
Robotik
Servomotoren werden in der Robotik häufig verwendet. Sie helfen dabei, die Roboterarme, -beine und andere Komponenten zu bewegen. Dies ermöglicht es den Robotern, verschiedene Funktionen auszuführen. Servos bieten präzise Kontrolle über die Bewegung in robotischen Systemen. Deshalb sind sie in Anwendungen wie Roboterhänden und humanoiden Robotern beliebt.
Automatischer Kamera-Fokus
Servomotoren können die Kameralinse bewegen, um auf verschiedene Objekte zu fokussieren. Dies ist nützlich für das Fotografieren oder Filmen. Die Kamera kann automatisch gesteuert werden, um sich auf bestimmte Bereiche oder Objekte im Bild zu konzentrieren.
3D-Drucker
180-Grad-Servomotoren werden in 3D-Druckern verwendet. Sie steuern die Bewegung des Druckkopfes und der Bauplattform. Dies hilft, genaue und präzise 3D-gedruckte Objekte zu erstellen. Servos sind in der 3D-Druck-Anwendung aufgrund ihrer gleichmäßigen Leistung und Zuverlässigkeit beliebt.
RC-Fahrzeuge und Drohnen
Arduino Servomotoren werden häufig in ferngesteuerten Fahrzeugen und Drohnen eingesetzt. Sie steuern die Lenkung in RC-Autos und die Motoren in den Propellern der Drohnen. Servos ermöglichen präzise Bewegungen und Kontrolle in diesen Luft- und Bodenfahrzeugen.
Smart Home Geräte
Servomotoren werden in verschiedenen Smart Home Geräten verwendet. Zum Beispiel können sie das Öffnen und Schließen von intelligenten Vorhängen oder Jalousien steuern. Sie können auch in automatisierten Tierfutterspendern oder zur Steuerung von Türschlössern verwendet werden.
Medizinische Geräte
Servomotoren finden in verschiedenen medizinischen Geräten Anwendung. Zum Beispiel können sie die Bewegung von Roboterarmen steuern, die in Operationen verwendet werden. Sie werden auch in Prothesen eingesetzt, um präzise und genaue Bewegungen zu ermöglichen.
Luft- und Raumfahrt
In der Luft- und Raumfahrtindustrie werden Servomotoren eingesetzt, um Flugzeugklappen und -ruder zu steuern. Sie bieten präzise Kontrolle und Zuverlässigkeit in der Luftfahrtsystemen. Servos werden auch in Drohnen und UAVs verwendet, um die Flugbewegungen zu steuern.
Indem man berücksichtigt, wie die Servos in verschiedenen Projekten verwendet werden, können Käufer den richtigen Servomotor für ihre Bedürfnisse auswählen.
Steuerung
Diejenigen, die neu in der Verwendung von Arduino-Servomotoren sind, sollten mit einer einfachen Steuerung beginnen. Der 180-Grad-Servo ist einfach mit einem Arduino-Board zu steuern. Es benötigt nur ein Signalkabel, das an einen PWM-Pin auf dem Board angeschlossen ist. Das Signalkabel steuert den Drehwinkel des Servos. Fortgeschrittenere Servomotoren erfordern zusätzliche Verdrahtungen und Stromquellen für eine ordnungsgemäße Steuerung.
Drehmoment
Drehmoment ist die Fähigkeit des Servos, sich gegen Widerstand zu drehen. Drehmoment ist entscheidend für Anwendungen, die eine höhere Haltekraft benötigen. Diese können in Roboterarmen und anderen Geräten mit mehreren Gelenken eingesetzt werden. Das Drehmoment wird normalerweise in kg/cm oder oz/inch gemessen. Die Drehmomentbewertung zeigt an, dass der Servo ein Gewicht von einem Kilogramm in einer Entfernung von 10 cm vom Drehpunkt heben kann.
Geschwindigkeit
Geschwindigkeit ist, wie schnell sich der Servo in den gewünschten Winkel bewegen kann. Wenn das Projekt schnelle Bewegungen erfordert, sollte nach einem Servo mit einer höheren Geschwindigkeitsbewertung gesucht werden. Dies wird in Sekunden pro 90 Grad Bewegung gemessen. Einige Anwendungen benötigen Servos mit einer schnelleren Reaktionszeit. Diese können in Kameragimbals und Renn-Drohnen eingesetzt werden. Andere Projekte können langsamere Servos verwenden. Dazu gehören automatisierte Tierfutterspender und Förderbänder.
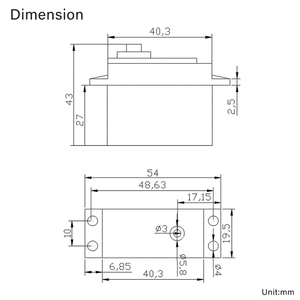
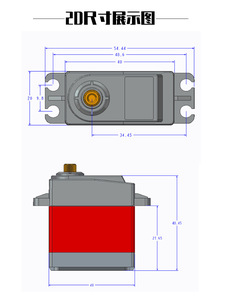
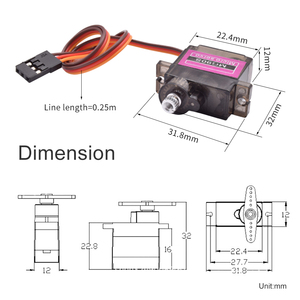
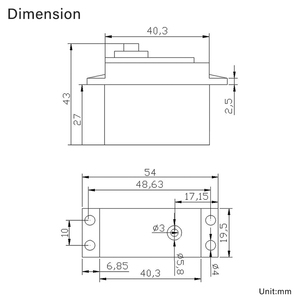
Größe und Gewicht
In Anwendungen, in denen der Platz begrenzt ist, sollte die Größe und das Gewicht des Servos berücksichtigt werden. Kleine Servos sind am besten für kompakte Designs geeignet. Dazu gehören Mini-Roboter und flache Türmechanismen. Wenn mehr Leistung und Funktionen benötigt werden, sollten größere Servos ausgewählt werden. Dazu gehören industrielle Maschinen und Hochleistungsroboter.
Qualität und Markenreputation
Käufer sollten Qualitätsprodukte von bekannten Marken erwerben. Lesen Sie die Bewertungen und vergleichen Sie verschiedene Optionen, bevor Sie eine Wahl treffen. Dies gewährleistet Zuverlässigkeit und Leistung in jedem Projekt.
Q1: Kann der Arduino mehr als einen Servo gleichzeitig steuern?
A1: Ja, Arduino kann mehrere Servos gleichzeitig steuern. Wenn Sie einen Arduino Uno verwenden, schließen Sie jeden Servo an separate PWM-Pins an. Der Uno hat drei PWM-Pins. Im Falle der Verwendung anderer Arduino-Boards überprüfen Sie die Anzahl der verfügbaren PWM-Pins und schließen Sie die Servos entsprechend an. Die Servos bewegen sich dann in ihre angegebenen Positionen gemäß dem Programm, abhängig von den PWM-Signalen, die vom Uno gesendet werden.
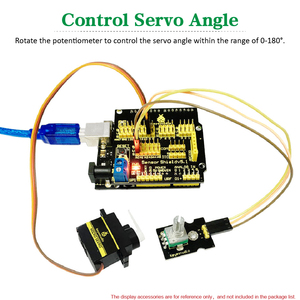
Q2: Welche Rolle spielt ein Potentiometer in diesem Projekt?
A2: Ein Potentiometer wird verwendet, um den Widerstand zu variieren und kann mit Arduino verbunden werden. Es fungiert als variabler Widerstand mit drei Anschlüssen – zwei, die mit der Versorgungs- und Bodenversorgung verbunden sind, und einer mit dem analogen Pin des Arduino. Wenn der Knopf am Potentiometer gedreht wird, ändert sich der Widerstand und ein analoger Wert wird an den Arduino gesendet. Dies ist nützlich für Projekte, bei denen der Benutzer die Servo-Position manuell steuern möchte, indem er den Potentiometer-Knopf dreht. Der Servo bewegt sich dann basierend auf dem analogen Eingang des Potentiometers.
Q3: Kann Arduino Servos ohne Verwendung von PWM steuern?
A3: Nein, Arduino muss PWM verwenden, um Servomotoren zu steuern. Servos benötigen ein spezifisches Signal mit einer Pulsbreite, die zwischen 1 und 2 Millisekunden moduliert ist, um ihre Position zu kennen. Sie können ohne dieses PWM-Signal nicht gesteuert werden.
Q4: Kann der Arduino Servomotoren unterschiedlicher Marken oder Spezifikationen steuern?
A4: Ja, der Arduino kann verschiedene Servos unterschiedlicher Marken oder Spezifikationen steuern. Solange sie Standard-180-Grad-Servos sind, die mit PWM-Signalen kompatibel sind, kann der Arduino sie steuern. Stellen Sie einfach sicher, dass sie angemessen mit Strom versorgt werden und dass der Signalausgang an den richtigen Arduino-Ausgang angeschlossen ist.
Q5: Was sollte getan werden, wenn der Servo nicht auf die Arduino-Steuerung reagiert?
A5: Wenn der Servo nicht reagiert, überprüfen Sie alle Verbindungen, um sicherzustellen, dass sie korrekt und sicher angeschlossen sind. Überprüfen Sie auch, ob der Servo nicht überlastet oder blockiert ist. Überprüfen Sie schließlich den Code auf Fehler.



















