Arduin Quadcopter Flugsteuerungen: Die verschiedenen Typen
Die Arduin Quadcopter Flugsteuerung ist das computergestützte Gehirn hinter dem Quadcopter. Sie empfängt Daten von verschiedenen Sensoren und hilft dabei, den Quadcopter zu steuern und zu kontrollieren. Hier sind einige der beliebten Flugsteuerungen, die Hersteller mit Arduino-Boards bauen können, und sie können als Open Source oder proprietär eingestuft werden:
- Open-Source-Flugsteuerungen:
Diese Flugsteuerungen verfügen über öffentlich verfügbare Software. Die Software kann an spezielle Anforderungen oder Vorlieben angepasst werden. Einige Vorteile von Open-Source-Steuerungen sind, dass sie sich mit dem Benutzer anpassen und entwickeln können, niedrigere Kosten haben, oft günstiger sind als proprietäre Steuerungen, eine große Community von Benutzern und Entwicklern haben, die Unterstützung bieten, zugänglichere Ressourcen und Dokumentation haben und Benutzern ermöglichen, mehr über Drohnentechnologien zu lernen und mit ihnen zu experimentieren.
Es gibt viele Open-Source-Software-Optionen für Flugsteuerungen zur Auswahl, wie z.B. ArduPilot, PX4, OpenPilot und MWC (MultiWii). Jedes dieser Systeme hat einzigartige Funktionen, Funktionalitäten und unterstützte Hardware. Bei der Auswahl müssen Hersteller die spezifischen Anforderungen ihres Projekts und die Hardware berücksichtigen, die sie verwenden möchten.
- Proprietäre Flugsteuerungen:
Dies sind Flugsteuerungen, deren Software geschlossen ist und nicht geändert werden kann. Manchmal wird die Flugsteuerungssoftware an den Hersteller lizenziert und kann als semi-proprietär eingestuft werden. Die Vorteile von proprietären Steuerungen sind, dass sie eine erwartete Leistung, Stabilität und Zuverlässigkeit bieten, da sie vom Anbieter in der tatsächlichen Produktion eingesetzt und getestet werden. Sie bieten auch professionellen Support und sind oft besser für Unternehmensanwendungen geeignet, die professionellen Support und Services benötigen.
Die Steuerungen passen sich möglicherweise nicht an die Benutzeranforderungen an und entwickeln sich auch nicht weiter. Die Gehäusesysteme passen möglicherweise nicht zu verschiedenen Hardwarevarianten und die Dokumentation ist möglicherweise nicht sehr detailliert. Dies kann den Nutzen der Steuerung für verschiedene Anwendungsfälle einschränken. Einige proprietäre Steuerungen bieten Integrationspotenzial und stammen von Anbietern, die ihre Flugsteuerungen wirtschaftlich und effizient in andere Komponenten integrieren können, wodurch die Gesamtfunktionalität verbessert wird.
Proprietäre Flugsteuerungen können in grundlegende und fortgeschrittene Typen eingeteilt werden. Grundlegende Flugsteuerungen haben eine minimale Funktionalität. Sie sind kostengünstig und gut geeignet für Projekte mit kleinem Budget. Fortschrittliche Flugsteuerungen haben mehr Funktionen und können komplexere Aufgaben und Missionen bewältigen. Sie sind mit mehr Hardware (leistungsstarke Prozessoren, zusätzliche Sensoren usw.) ausgestattet und teurer.
Funktionen und Merkmale von Arduino Quadcopter Flugsteuerungen
Die Funktionen und Merkmale von Arduino-Flugsteuerungen für Quadcopter können je nach Modell und Hersteller stark variieren. Flugsteuerungen sind wichtige Komponenten einer Drohne, und ihre Hauptfunktionen sind die Steuerung der Bewegung und Ausrichtung der Drohne im Flug.
Hier sind einige gängige Funktionen und Merkmale, die man in Arduino Quadcopter Flugsteuerungen erwarten kann:
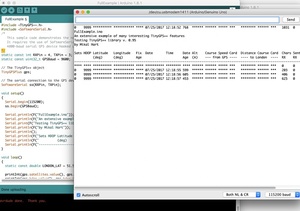
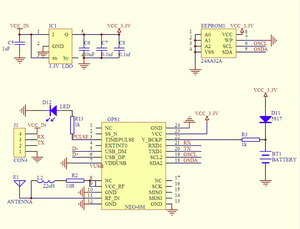
- GPS-Integration: Einige Quadcopter Flugsteuerungen verfügen über GPS-Funktionalität, die grundlegende Navigation, Wegpunkteflug, Rückkehr zur Startposition und Geofencing-Funktionen ermöglicht.
- Failsafe & Rückkehr zur Startposition: Flugsteuerungen sollten über Failsafe-Mechanismen verfügen, die Spannungsabfälle oder Signalverluste erkennen, um eine sichere Landung zu gewährleisten. Fortschrittlichere Steuerungen können RTH-Funktionalität (Return to Home) beinhalten, die die Drohne im Falle eines Signalverlusts oder einer niedrigen Batterie automatisch zum Startpunkt zurückbringt.
- Verhedderungs- und Erschütterungsschutz: Fortschrittliche Steuerungen verfügen über Verhedderungs- und Erschütterungsschutzmechanismen, die die Drohne in der Luft stabilisieren, um Verwicklungen mit anderen Objekten zu verhindern.
- Höhenhaltefunktion: Diese Funktion ermöglicht es der Drohne, ihre Höhe automatisch zu halten, ohne dass der Pilot die Drosselklappe ständig anpassen muss. Die Flugsteuerung mit einem Höhenmesser kann die aktuelle Höhe erkennen und halten.
- Fernbedienungs-Schnittstelle: Die Quadcopter-Flugsteuerung ist so konzipiert, dass Benutzer Flugparameter, Kalibrierungssensoren und Einstellungen über eine Fernbedienungs-Schnittstelle wie eine Begleit-App oder Bodensoftware anpassen können.
- Kompaktes Design: Die meisten Quadcopter-Flugsteuerungen haben ein kompaktes Design für eine einfache Integration in die Drohne, wobei gleichzeitig der Platzbedarf minimiert wird.
- Gewicht & Größe: Das Gewicht und die Größe der Flugsteuerung sind wichtige Faktoren, da sie sich auf die Gesamtgröße und das Gewicht des Quadcopters auswirken können, was wiederum seine Flugleistung und die Nutzlastkapazität beeinflusst.
- Sensordatenfusion: Fortschrittliche Quadcopter-Steuerungen verfügen über Sensordatenfusionsfunktionen, bei denen Daten aus verschiedenen Sensoren kombiniert werden, um eine verbesserte Flugsteuerung und Stabilität zu erreichen.
- Latenz: Die Verarbeitungsgeschwindigkeit der Flugsteuerung kann sich auf die Latenz oder Verzögerung bei der Reaktion auf Piloteingaben auswirken. Steuerungen mit niedriger Latenz bieten eine reaktionsschnellere Flugweise für eine bessere Kontrolle.
- Software & Abstimmung: Diese Funktion ermöglicht es, die Steuerung richtig abzustimmen, um Flugeigenschaften anzupassen und die Leistung zu optimieren, um sie an spezifische Anforderungen anzupassen.
- Stromversorgung: Die Flugsteuerung benötigt in der Regel eine eigene Stromversorgung aus dem Akku des Quadcopters. Käufer müssen sicherstellen, dass die Stromversorgungsspannung mit den Spezifikationen der Steuerung kompatibel ist.
Anwendungen von Arduino Quadcopter Flugsteuerungen
Der Markt für Quadcopter wird voraussichtlich schnell wachsen und bis 2027 einen Wert von 7.319,95 Millionen USD erreichen, mit einer durchschnittlichen jährlichen Wachstumsrate von 12,18 % von 2023 bis 2027. Dies unterstreicht die wachsende Bedeutung der Drohnenindustrie, die verschiedene Anwendungen umfasst, wie z.B. den Erkundungs- und Abenteuermarkt, Luftaufnahmen und -videografie, Vermessung und Kartierung, Filmemachen sowie Inspektion und Überwachung. All diese Anwendungen sind ein Beweis für die Vielseitigkeit und Funktionalität von Drohnen und führen zum Aufstieg dieses wettbewerbsintensiven Marktes. Dies unterstreicht auch die Bedeutung des Verständnisses der Unterschiede zwischen RC-Hubschraubern und Quadcoptern, da es Einblicke in ihre unterschiedlichen Funktionalitäten gibt. Zusammen repräsentieren diese Märkte eine Mehrmilliarden-Dollar-Industrie, die weltweit Tausende von Arbeitnehmern und Unternehmen beschäftigt und unterstützt und die Bedeutung des industriellen, Freizeit- und kommerziellen Sektors des Drohnenmarktes hervorhebt.
- Präzise Steuerung: Die Arduino-Flugsteuerung bietet präzise Steuerung über Quads, was stabile und genaue Flugmanöver gewährleistet. Dies ist entscheidend für Anwendungen wie Luftaufnahmen, Vermessung, Inspektion und Überwachung, bei denen präzise Positionierung und stabiler Flug erforderlich sind. Die Algorithmen und Sensoren der Flugsteuerung ermöglichen eine präzise Steuerung der Haltung, Position und Geschwindigkeit des Quadcopters, sodass er komplexe Manöver mit Genauigkeit ausführen kann. Dies stellt sicher, dass die Nutzlast, wie z.B. Kameras oder Sensoren, hochwertige Bilder aufnehmen, genaue Kartierungen durchführen und kritische Infrastrukturen präzise überwachen kann.
- Autonomer Flug: Mit einer Arduino-basierten Steuerung können Quadcopter programmiert werden, um vorgegebenen Flugpfaden zu folgen oder automatisierte Aufgaben zu erledigen. Dies ist vorteilhaft für Anwendungen wie Kartierung, Vermessung, Such- und Rettungseinsätze sowie Inspektionsaufgaben, bei denen sich wiederholende oder komplexe Flugmanöver erforderlich sind. Die Fähigkeit zum autonomen Flug ermöglicht es dem Quadcopter, die programmierte Mission präzise und konsistent auszuführen, wodurch der Bedarf an manueller Intervention reduziert wird. Dies spart Zeit, verbessert die Effizienz und minimiert menschliche Fehler in diesen Anwendungen.
- Sensorintegration: Arduino-Flugsteuerungen können verschiedene Sensoren (GPS, Höhenmesser, Kompasse usw.) integrieren, um Funktionen wie Höhenhaltefunktion, Wegpunkte-Navigation und Geofencing zu ermöglichen. Die Sensorintegration erweitert die Fähigkeiten des Quadcopters und ermöglicht es ihm, fortgeschrittene Flugfunktionen auszuführen. So ermöglicht der GPS-Empfänger beispielsweise die Wegpunkte-Navigation, bei der der Quadcopter basierend auf GPS-Koordinaten automatisch zu vorgegebenen Orten fliegen kann. Der Höhenmesser-Sensor ermöglicht die Höhenhaltefunktion, die den Quadcopter während des Flugs auf einer stabilen Höhe hält. Der Kompass-Sensor liefert Peilungsinformationen für die Navigation und Orientierung. Diese Sensoren arbeiten zusammen, um präzise Daten für die Algorithmen der Flugsteuerung zu liefern, was die Navigation, Stabilität und die Gesamtleistung des Quadcopters verbessert.
- Notfallbehandlung: Einige Flugsteuerungen bieten Funktionen wie eine Rückkehr zur Startposition, GPS-Stabilisierung und Failsafe-Modi, um einen sicheren Betrieb im Notfall oder bei Signalverlust zu gewährleisten. Diese Notfallbehandlungsfunktionen sind entscheidend, um die Sicherheit und Integrität des Quadcopters während unerwarteter Situationen zu gewährleisten. Die Rückkehr zur Startposition ermöglicht es dem Quadcopter, basierend auf seiner GPS-Position automatisch zu seinem Ausgangspunkt zurückzufliegen, wenn ein niedriger Batteriestand, ein Signalverlust oder andere Notfälle festgestellt werden. Die GPS-Stabilisierung trägt dazu bei, die Position des Quadcopters mithilfe von GPS-Daten im Falle eines Kontrollverlusts zu stabilisieren, um sicherzustellen, dass er sicher an Ort und Stelle schwebt. Failsafe-Modi aktivieren vordefinierte Aktionen, um den Quadcopter und seine Umgebung zu schützen, wie z.B. eine sichere Landung oder die Maximierung des Akkus.
So wählen Sie Arduino Quadcopter Flugsteuerungen aus
Bei der Auswahl einer Arduino-Flugsteuerung für einen DIY-Quadcopter ist es wichtig, mehrere wichtige Faktoren zu berücksichtigen, die sich erheblich auf die Gesamtleistung, Funktionalität und Benutzererfahrung auswirken können.
- Verstehen Sie die Projektanforderungen: Bevor Sie Komponenten kaufen, ist es wichtig, die Anforderungen des Projekts zu verstehen und zu ermitteln. Welche Art von Drohne, RC-Fahrzeug oder Quadcopter wird hergestellt? Welche Größe wollen Sie mit den Propellern und dem Rahmen herstellen? Wenn Sie das Gewicht schätzen, wissen Sie, wie viel Gewicht die Flugsteuerung tragen kann.
- Gyroskop und Beschleunigungsmesser: Eine Flugsteuerung mit einem Gyroskop und Beschleunigungsmesser (IMU) ist für einen stabilen Multirotorflug unerlässlich. Der IMU-Sensor erkennt Orientierung, Bewegung und Rotation, um die Drohne im Flug stabil zu halten. Achten Sie darauf, eine Flugsteuerung mit einem hochwertigen IMU für eine stabile Steuerung auszuwählen.
- Konnektivität und Kompatibilität: Bewerten Sie die Konnektivitätsoptionen und Schnittstellen der Steuerung. Stellen Sie sicher, dass sie über die erforderlichen Ports und Schnittstellen verfügt, um alle vorgesehenen Komponenten (Sensoren, Aktuatoren, Kommunikationsmodule usw.) anzuschließen. Überprüfen Sie die Kompatibilität mit anderen Arduino-basierten Teilen und stellen Sie eine nahtlose Integration sicher.
- Verarbeitungsleistung und Speicher: Berücksichtigen Sie die Verarbeitungsleistung und die Speicherkapazität der Flugsteuerung. Stellen Sie sicher, dass sie über genügend Ressourcen verfügt, um die benötigte Software und Algorithmen reibungslos auszuführen. Eine leistungsfähige Flugsteuerung kann Sensordaten schnell und präzise verarbeiten.
- Mehrzweckfunktionalität: Wenn Sie auf der Suche nach einer vielseitigen Steuerung sind, die mehr als nur die Flugsteuerung bietet, sollten Sie eine Steuerung mit mehreren Funktionen in Betracht ziehen. Einige Flugsteuerungen können für Roboter oder andere Fahrzeuge verwendet werden. Indem Sie an verschiedenen Anwendungen arbeiten, können Sie Geld sparen und die Dinge einfach halten, da Sie nur eine Art von Steuerung haben.
- Software, Firmware und R/C-Empfänger-Kompatibilität: Wählen Sie eine Flugsteuerung, die eine einfach zu bedienende Software für die Konfiguration und Abstimmung bietet. Überprüfen Sie, ob sie Open-Source-Firmware und Softwareentwicklungsplattformen unterstützt. Stellen Sie außerdem sicher, dass die flybarless-Flugsteuerung mit RC-Sendern und -Empfängern kompatibel ist.
Arduino Quadcopter Flugsteuerung Fragen & Antworten
F1: Was sind die Vorteile der Verwendung einer Arduino-basierten Flugsteuerung?
A1: Eine Arduino-basierte Flugsteuerung bietet Flexibilität, Anpassungsmöglichkeiten, eine große unterstützende Community und Kosteneffizienz im Vergleich zu vorgefertigten Quadcopter-Steuerungen.
F2: Was sind die Herausforderungen bei der Verwendung einer Arduino-basierten Steuerung?
A2: Zu den Herausforderungen gehören möglicherweise zusätzliche Konfigurationskomplexität, die steile Lernkurve für Anfänger, begrenzte Hardware im Vergleich zu kommerziellen Steuerungen und die Notwendigkeit, mehr Komponenten einzeln zu integrieren.
F3: Kann eine Arduino-basierte Flugsteuerung für jeden Quadcopter verwendet werden?
A3: Ja, die Steuerung kann für jeden Quadcopter verwendet werden, vorausgesetzt, er erfüllt die Anforderungen in Bezug auf Gewicht und Leistung. Sie kann auch für andere Drohnenkonfigurationen verwendet werden, wie z.B. Hexacopter und Octocopter.
F4: Ist es möglich, eine Arduino-basierte Flugsteuerung zu aktualisieren?
A4: Ja, ein Benutzer kann die Steuerung aktualisieren, indem er neue Firmware herunterlädt und installiert. Durch das Upgrade der Steuerung können zusätzliche Funktionen, verbesserte Leistung und verbesserte Funktionalität bereitgestellt werden.
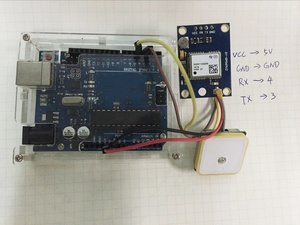
F5: Wie wird die Arduino-Flugsteuerung mit anderen Komponenten der Drohne verbunden?
A5: Die Arduino-Flugsteuerung verfügt über eine Reihe von Ein- und Ausgängen. Sie kann über elektrische Stecker, gelötete Drähte oder ein Bussystem mit anderen Komponenten verbunden werden. Eine korrekte Verdrahtung stellt sicher, dass die Steuerung Daten von den Sensoren empfangen und Befehle an die Motoren senden kann.