
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(781 Produkte verfügbar)






 Sofort lieferbar
Sofort lieferbar











 Sofort lieferbar
Sofort lieferbar







































 Sofort lieferbar
Sofort lieferbar



 Sofort lieferbar
Sofort lieferbar






 Sofort lieferbar
Sofort lieferbar


























































 Sofort lieferbar
Sofort lieferbar






 Sofort lieferbar
Sofort lieferbar







 Sofort lieferbar
Sofort lieferbar











Arduino-Roboter-Servos gibt es in verschiedenen Ausführungen, die jeweils für eine einzigartige Funktion ausgelegt sind. Dazu gehören:
Standardservos
Standardservos sind allgemein als reguläre oder Mini-Servos bekannt. Sie haben in der Regel einen Bewegungsbereich von 180 Grad. Diese Bewegung erfolgt in einer schwingenden Action, ähnlich der eines menschlichen Arms. Reguläre Servos werden verwendet, um die Bewegung von Rädern und Armen zu steuern. Sie regeln Vorwärts- und Rückwärtsbewegungen. Sie sind ideal für einfache Roboteranwendungen, wie das Bewegen von Spielzeugrobotern oder das Steuern von Klappen oder Armen.
Servos mit kontinuierlicher Drehung
Servos mit kontinuierlicher Drehung, oft als GPS-Servos bezeichnet, bieten eine unbegrenzte 360-Grad-Drehung. Diese Drehung erfolgt in sowohl im Uhrzeigersinn als auch gegen den Uhrzeigersinn. Die Bewegung wird gesteuert, indem die Impulsbreite des Signals angepasst wird, das von der Arduino-Platine gesendet wird. Servos mit kontinuierlicher Drehung werden in Anwendungen eingesetzt, bei denen eine kontinuierliche Drehbewegung erforderlich ist. Zum Beispiel werden sie in mobilen Robotern und Roboterautos verwendet, um die Vorwärts- und Rückwärtsbewegung der Räder zu steuern.
Digitale Servos
Digitale Servos verwenden eine digitale Schaltung anstelle einer analogen. Diese Schaltung verbessert Präzision, Konsistenz und Leistung. Sie haben einen größeren Bewegungsbereich von etwa 180 Grad. Diese Bewegung ist flüssiger als die von analogen Servos. Digitale Servos werden in Anwendungen eingesetzt, die hohe Präzision und schnelle Reaktionen erfordern. Beispielsweise finden sie Verwendung in Drohnen, RC-Fahrzeugen und Roboterarmen.
Metallgetriebe-Servos
Metallgetriebe-Servos haben Zahnräder aus Metall. Diese Bauweise ermöglicht es ihnen, höhere Lasten zu bewältigen und reibungsloser zu arbeiten. Sie sind langlebiger als Standardservos und haben ein höheres Drehmoment. Dieses Merkmal macht sie ideal für Anwendungen mit hoher Belastung oder kontinuierlicher Nutzung, einschließlich Industriemaschinen und 3D-Druckern.
Mini-Servos
Mini-Servos sind klein und leicht. Sie sind für Anwendungen konzipiert, bei denen der Platz begrenzt ist. Mini-Servos haben einen kleineren Bewegungsbereich und ein niedrigeres Drehmoment als Standardservos. Dennoch sind sie einfacher zu steuern. Sie sind ideal für kleine Roboter, RC-Fahrzeuge und andere Anwendungen mit Platzbeschränkungen.
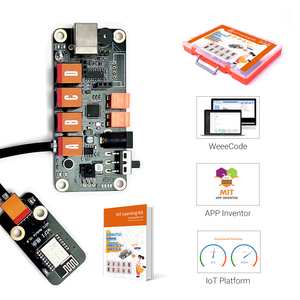
Bei der Auswahl eines Roboterservos für ein Arduino-Projekt müssen mehrere wichtige Faktoren berücksichtigt werden, um Kompatibilität, Leistung und Funktionalität zu gewährleisten. Diese Faktoren sind entscheidend, damit der gewählte Servo die Anforderungen des Projekts erfüllt und reibungslos in das Arduino-System integriert werden kann. Ein wichtiges Kriterium ist die Kompatibilität des Servos mit Arduino. Dies umfasst die Überprüfung, ob die verwendete Arduino-Platine diesen Servotyp effektiv steuern kann. Servos werden in drei Haupttypen kategorisiert: Servos mit kontinuierlicher Drehung, Standard (mit begrenzter Drehung) Servos und Mini-Standardservos. Jeder Typ hat seine eigenen einzigartigen Eigenschaften und Anwendungen.
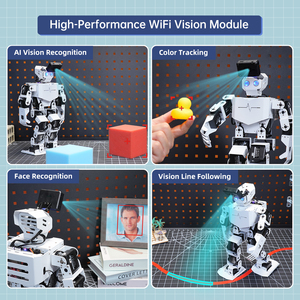
Servos mit kontinuierlicher Drehung sind ideal für Anwendungen, die eine vollständige Drehung in beide Richtungen erfordern, beispielsweise in Roboterrädern. Sie werden häufig in Linienfolgerobotern verwendet. Allerdings verfügen diese Servos nicht über eine Positionsrückmeldung, sodass es schwierig ist, präzise Positionen zu steuern. Auf der anderen Seite bieten Standardservos eine begrenzte Drehung, die typischerweise 180 Grad umfasst. Sie haben Positionssteuerfähigkeiten, die eine präzise Positionierung von Roboterteilen ermöglichen. Standardservos sind gut geeignet für Aufgaben, die armähnliche Bewegungen erfordern, wie bei einem Roboterarm. Mini-Standardservos bieten eine kompakte Lösung, wenn der Platz begrenzt ist. Sie bieten eine ähnliche Funktionalität wie Standardservos, sind jedoch kleiner, was sie ideal für den Einsatz in kleinen Robotern und anderen Anwendungen mit Platzbeschränkungen macht.
Ein weiterer wichtiger Aspekt ist die Drehmomentbewertung des Servos. Das Drehmoment bezieht sich auf die Drehkraft, die vom Servo ausgeübt wird. Es ist entscheidend, einen Servo mit ausreichend Drehmoment auszuwählen, um die gewünschte Last zu heben oder zu bewegen. Die Drehmomentbewertung des Servos ist ein wichtiger Aspekt bei der Auswahl eines Servomotors. Sie bestimmt die Fähigkeit des Motors, die Last zu bewältigen und die erforderlichen Aufgaben auszuführen. Servos mit hohen Drehmomentbewertungen sind in der Lage, schwere Lasten zu bewegen und anspruchsvolle Aufgaben auszuführen. Sie sind für Anwendungen geeignet, die hohe Präzision und Genauigkeit erfordern.
Darüber hinaus ist es wichtig, den Steuermechanismus des Servos zu beachten. Einige Servos benötigen PWM (Pulsweitenmodulation)-Signale zur Steuerung, während andere möglicherweise andere Steuerungsmethoden benötigen. Es ist von entscheidender Bedeutung sicherzustellen, dass die Arduino-Platine die erforderlichen Steuersignale für den ausgewählten Servo erzeugen kann. Außerdem sollten die Energieversorgungsanforderungen des Servos berücksichtigt werden. Servos arbeiten typischerweise innerhalb eines bestimmten Spannungsbereichs, und die Bereitstellung der richtigen Spannung ist entscheidend für die ordnungsgemäße Funktion des Servos. Spannungsregulatoren oder spezielle Stromversorgungen können erforderlich sein, um sicherzustellen, dass der Servo die passende Spannung erhält.
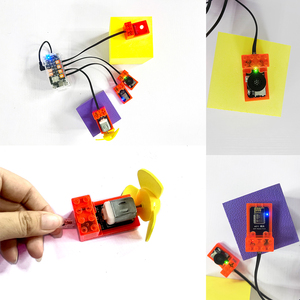
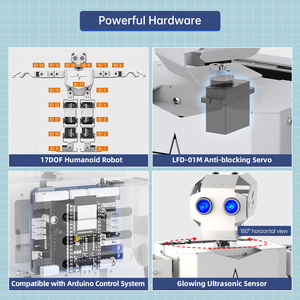
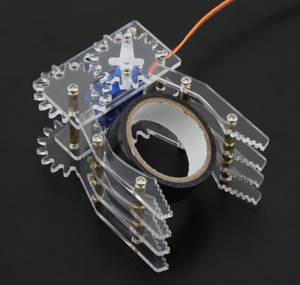
Die drei Komponenten eines Roboter-Servos mit Arduino sind seine Funktionen, Eigenschaften und sein Design. Ein Arduino-basierter Roboter-Servo hat verschiedene Funktionen, wie das Drehen von Objekten, das Bewegen von Maschinen und das Steuern von Kameras. Der Roboter-Servo hilft, Objekte oder Teile zu drehen, die an ihm befestigt sind. Er wird verwendet, um die Teile der Maschine zu drehen, die Maschine zu bewegen und Kameras zu steuern.
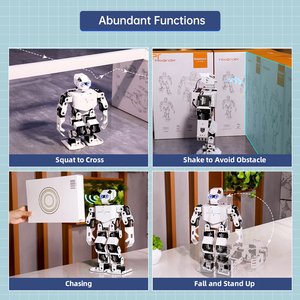
Servos werden in Maschinen verwendet, um deren Bewegung und Aktionen zu steuern. Beispielsweise kann ein Roboter-Servo verwendet werden, um die Bewegung eines Roboterarms zu steuern. Auch die Bewegung eines Rades kann gesteuert werden, sodass sich die Maschine fortbewegen kann. Darüber hinaus kann ein Roboter-Servo verwendet werden, um die Bewegung der Kamera zu steuern, um deren Winkel und Richtung zu verändern.
Neben seinen Funktionen hat ein Roboter-Servo auch mehrere Eigenschaften. Ein häufiges Merkmal eines Roboter-Servos ist seine 360-Grad-Drehung. Mit einer 360-Grad-Drehung kann der Servo kontinuierlich in beide Richtungen drehen. Das bedeutet, dass sich das angehängte Objekt ohne Einschränkungen im gesamten Kreis bewegen kann. Die Drehung kann auch in jedem gewünschten Winkel gestoppt werden.
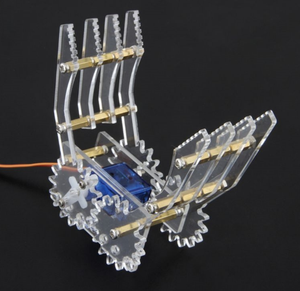
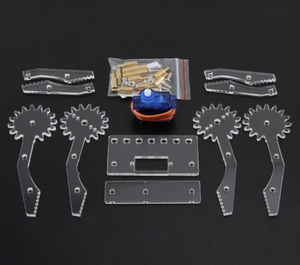
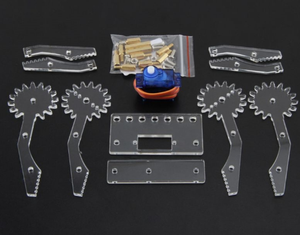
Servos sind außerdem mit einem Steuerarm ausgestattet, der am rotierenden Achs befestigt ist. Der Steuerarm bewegt sich zusammen mit der rotierenden Achse, wenn der Servo aktiviert ist. Der Steuerarm kann je nach Position der rotierenden Achse in verschiedene Positionen bewegt werden. Servos haben auch Zahnräder, die helfen, die Bewegungsrichtung zu ändern. Sie verfügen über verschiedene Montageschienen für eine einfache Installation auf unterschiedlichen Oberflächen.
Darüber hinaus verwenden die meisten Roboter-Servos ein Kunststoffrad und Gummibänder auf der äußeren Seite des Rades. Das Kunststoffrad ist das Teil, das der Servomotor dreht. Es hat Gummibänder, die beim Bewegen des Rades für Haftung sorgen. Dadurch kann der Servo auf Oberflächen bewegen, ohne zu rutschen. Das Design eines Roboter-Servos verwendet auch eine Vielzahl von Materialien, darunter Kunststoff, Metall und Legierungen.
Sicherheitsstandards
Es gibt viele Sicherheitsstandards, die bei der Konstruktion eines Servomotors mit Arduino berücksichtigt werden müssen. Einige der wichtigsten Sicherheitsstandards sind:
IEC 62014: Dieser Standard bezieht sich hauptsächlich auf elektrische und elektronische Geräte, einschließlich Servomotoren. Ziel dieses Standards ist es, sicherzustellen, dass Geräte so gestaltet und gebaut werden, dass sie sicher betrieben werden können und keinen Schaden für Menschen oder Tiere verursachen.
UL-Zertifizierung: Unterwriters Laboratories (UL) ist eine unabhängige Organisation für Sicherheitswissenschaften, die Zertifizierungen und Prüfzeichen für Produkte ausstellt. Dazu gehört die Vergabe von Zertifikaten für Sicherheitsmerkmale von Servomotoren. UL testet auch Produkte, um sicherzustellen, dass sie die Sicherheitsstandards in Bezug auf Brand-, elektrischen und mechanischen Gefahren erfüllen.
ISO 9001: Dies ist ein Standard für Qualitätsmanagementsysteme von der Internationalen Normungsorganisation (ISO). Eine ISO 9001-Zertifizierung zeigt, dass ein Unternehmen ein Qualitätsmanagementsystem implementiert hat, das internationalen Standards entspricht. Dies gewährleistet konsistente Qualität und Kundenzufriedenheit durch Prozesse wie kontinuierliche Verbesserung und Kundenzufriedenheit.
Qualität
Es gibt mehrere Qualitätsstandards, die bei der Konstruktion eines Servomotors mit Arduino berücksichtigt werden müssen. Einige der wichtigsten Qualitätsstandards sind:
ISO 9001: Dieser Standard betrifft Qualitätsmanagementsysteme. Die Zertifizierung zeigt, dass ein Unternehmen ein Qualitätsmanagementsystem implementiert hat, das internationalen Standards entspricht. Dies gewährleistet konsistente Qualität und Kundenzufriedenheit durch Prozesse wie kontinuierliche Verbesserung und Kundenzufriedenheit.
IEC 61500: Dies sind internationale elektrische Standards für Sicherheits- und Qualitätskontrolle. Dieser Standard umfasst ein breites Spektrum an elektrischen und elektronischen Produkten, einschließlich Mess- und Steuergeräten, Stromversorgungsausrüstung sowie Maschinen und Geräten.
Q1: Was ist ein Roboter-Servo?
A1: Ein Roboter-Servo ist ein kleiner Motor, der Maschinen präzise bewegt. Er bringt Teile von Robotern, wie Arme oder Beine, dazu, sich an bestimmte Stellen zu bewegen und dort zu bleiben. Servos verwenden ein sogenanntes Impulssignal, um zu erfahren, wie weit sie sich bewegen sollen.
Q2: Was sind die 3 Arten von Servos?
A2: Die drei Arten von Servos sind Standard-, kontinuierliche Drehungs- und lineare Servos. Standardservos bewegen sich zu einer festgelegten Position innerhalb eines begrenzten Bereichs. Servos mit kontinuierlicher Drehung drehen sich unendlich, was endlose Bewegungen in eine Richtung ermöglicht. Servos mit kontinuierlicher Drehung sind nützlich zum Antrieb von Rädern in mobilen Robotern.
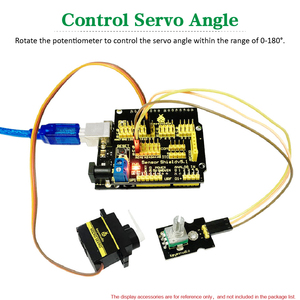
Q3: Wie funktioniert ein Roboter-Servo?
A3: Ein Roboter-Servo funktioniert, indem er Signale von einem Steuergerät, wie einem Arduino, empfängt. Das Steuergerät sendet Impuls-Signale, die dem Servo sagen, wie weit er sich bewegen soll. Im Inneren des Servos befindet sich ein Motor, der sich abhängig von diesen Signalen zur gewünschten Position dreht.
Q4: Was sind die Anwendungen von Servos in einem Roboter?
A4: Servos werden in Robotern verwendet, um verschiedene Teile zu bewegen. Sie können an Armen, Beinen, Rädern oder jedem Teil angebracht werden, das seine Position ändern muss. Servos ermöglichen Robotern kontrollierte, präzise Bewegungen.
Q5: Was ist der Vorteil der Verwendung eines Servomotors in Robotern?
A5: Servomotoren ermöglichen Robotern eine sanfte, exakte Bewegung, wo sie benötigt wird. Sie können programmiert werden, um in jedem Winkel oder jeder Position anzuhalten. Dieses Maß an Kontrolle hilft Robotern, Aufgaben genauer auszuführen.



















