
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(352 Produkte verfügbar)











 Ready to Ship
Ready to Ship

















 Ready to Ship
Ready to Ship



















































 Ready to Ship
Ready to Ship






















 Ready to Ship
Ready to Ship



 Ready to Ship
Ready to Ship













 Ready to Ship
Ready to Ship

































































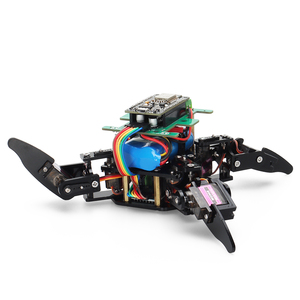
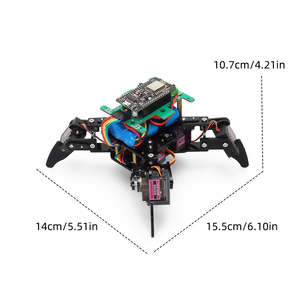
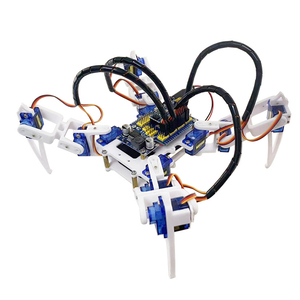
Der Arduino-Spinnenroboter ist eine Art von robotischem Gerät, das die Bewegung einer Spinne nachahmt, indem es die Arduino-Plattform für sein Steuerungssystem nutzt. Er besteht aus einem Körper, Beinen und Gelenken, die einer Spinne ähneln. Der Roboter kann sich bewegen, indem er seine Beine mit Servomotoren steuert, und kann programmiert werden, um verschiedene Aktivitäten mit Hilfe eines Arduino-Boards auszuführen.
Es gibt verschiedene Arten von Arduino-Spinnenrobotern, darunter:
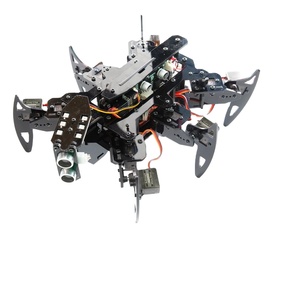
Hexapod-Spinnenroboter
Diese Roboter nutzen sechs Beine, von denen jedes drei Gelenke hat, für die Bewegung. Die Beine sind am Körper des Roboters am Hüftgelenk befestigt, was Vorwärts- und Rückwärtsbewegungen ermöglicht. Hexapod-Spinnenroboter sind sehr stabil und können sich glatt vorwärts, rückwärts oder seitwärts bewegen. Dies liegt daran, dass sie sechs Beine haben, die eine stabile Basis für den Roboter bieten, selbst wenn sie über unwegsames Gelände fahren. Jedes Bein kann individuell gesteuert werden, was präzise Bewegungen und Koordination zwischen den Beinen ermöglicht. Sie werden in der Forschung, Erkundung und Ausbildung eingesetzt, wo Stabilität und präzise Beinsteuerung erforderlich sind.
Mini-Spinnenroboter
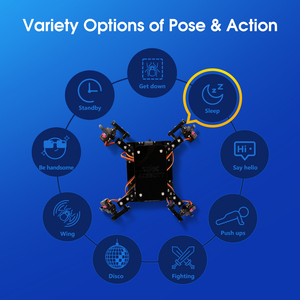
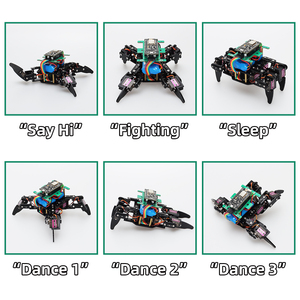
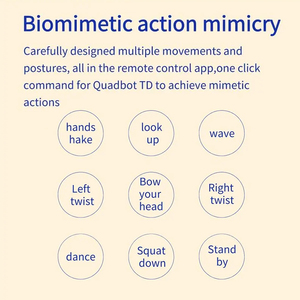
Diese Roboter sind kleinere Versionen von Hexapod-Spinnenrobotern. Sie haben sechs Beine mit drei Gelenken an jedem Bein. Mini-Spinnenroboter sind kompakt und leicht, was sie sehr agil macht und ihnen ermöglicht, sich schnell in alle Richtungen zu bewegen. Sie können so gesteuert werden, dass sie gehen, rennen, sich drehen oder tanzen, entweder programmiert oder aus der Ferne mit einem Steuergerät. Sie werden drinnen für Unterhaltungs- und Bildungszwecke eingesetzt, um Ingenieur- und Programmierfähigkeiten zu demonstrieren.
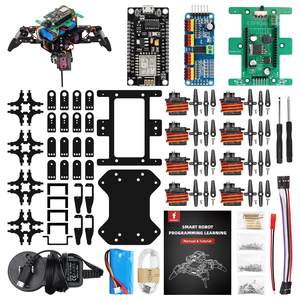
Mechanische Spinnenroboter
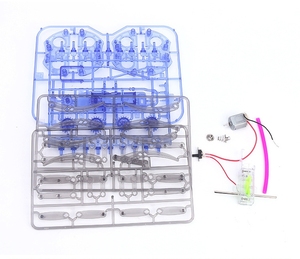
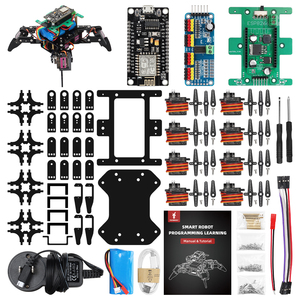
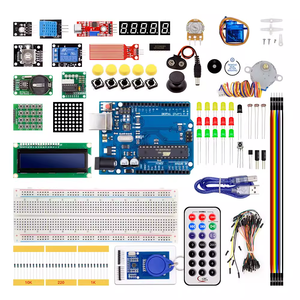
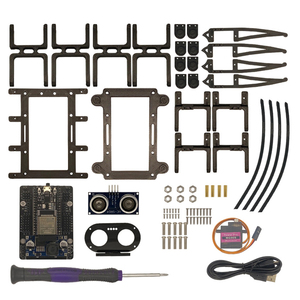
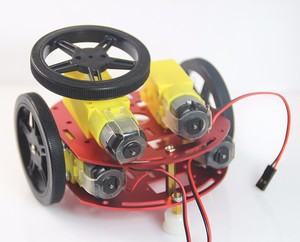
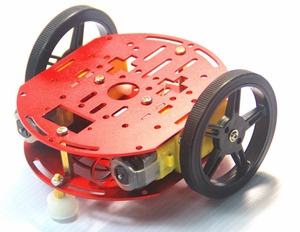
Mechanische Spinnenroboter haben mechanische Teile wie Zahnräder, Räder und Motoren, die sie in Bewegung setzen. Sie werden mit Bausätzen gebaut, die alle notwendigen Teile enthalten, einschließlich des Arduino-Boards, Servos und Sensoren. Die Bausätze enthalten Anleitungen für den Zusammenbau des Roboters und das Schreiben der Steuerprogramme. Dies erleichtert Anfängern das Lernen, wie man Roboter baut und programmiert. Mechanische Spinnenroboter sind in Schulen und unter Bastlern populär, da sie einfach zu bauen sind und praktische Erfahrungen in Robotik, Elektronik und Programmierung bieten.
Raspberry Pi-Spinnenroboter
Diese sind ähnlich wie Arduino-Spinnenroboter, verwenden jedoch einen Raspberry Pi anstelle eines Arduino-Boards. Der Raspberry Pi ist ein kleiner Computer, der viele Dinge tun kann, die ein regulärer Computer kann, wie z.B. sich mit dem Internet zu verbinden, Videos abzuspielen und verschiedene Softwareprogramme auszuführen. Spinnenroboter, die mit Raspberry Pi hergestellt werden, sind leistungsfähiger als die mit Arduino, da sie komplexere Programme ausführen und mehrere Aufgaben gleichzeitig bearbeiten können. Sie werden für fortgeschrittene Robotikprojekte und in Situationen eingesetzt, in denen mehr Rechenleistung erforderlich ist.
Bei der Auswahl eines Arduino-Spinnenroboter-Bausatzes sollten Sie den Schwierigkeitsgrad, die Komponenten und die beabsichtigte Verwendung berücksichtigen. Die Bewertung stellt sicher, dass der gewählte Bausatz den Fähigkeiten und Zielen des Benutzers entspricht und alle notwendigen Teile für den Zusammenbau und die Funktion bietet.
Fähigkeitsniveau
Dies ist wichtig bei der Auswahl des richtigen Arduino-Spinnenroboter-Bausatzes. Es gibt Bausätze für Anfänger, Fortgeschrittene und Experten. Anfänger finden vorprogrammierte Codes und Schritt-für-Schritt-Anleitungen hilfreich. Fortgeschrittene Nutzer modifizieren bestehende Codes und probieren neue Sensoren aus. Fortgeschrittene Benutzer beschäftigen sich intensiv damit, komplexe Algorithmen zu entwerfen und verschiedene fortgeschrittene Sensoren und Komponenten zu integrieren. Daher gewährleistet das Verständnis des Fähigkeitsniveaus, dass man den Bausatz effektiv nutzen kann, um zu lernen und zu kreieren.
Zweck und Anwendungen
Die Bestimmung, was der Roboter tun und wie er verwendet werden soll, hilft bei der Auswahl des besten Arduino-Spinnenroboter-Bausatzes. Bausätze können für die Erkundung in verschiedenen Bereichen wie Bildung, Forschung oder Unterhaltung ausgewählt werden. Dies hilft, die erforderlichen Komponenten und Funktionen zu beschaffen. Wenn der Roboter beispielsweise zur Überwachung eingesetzt wird, wären eine Kameraanordnung und ein Wi-Fi-Modul notwendig. Die beabsichtigte Verwendung leitet die Entscheidungen zu den erforderlichen Teilen, der Programmierflexibilität und den Anpassungsoptionen.
Geländekompatibilität
Wenn der Roboter drinnen oder draußen, auf glatten oder rauen Oberflächen verwendet werden soll, sollten die Räder und Beine berücksichtigt werden. Optimierte Designs für die vorgesehenen Terrains ermöglichen effiziente Bewegung und Navigation. Daher gewährleistet die Berücksichtigung des Geländes, auf dem der Roboter eingesetzt wird, dass sein Design für die Umgebung geeignet ist, um eine effektive Leistung zu gewährleisten.
Budget und Kosten
Bei der Auswahl eines Arduino-Spinnenroboter-Bausatzes ist das Budget ein wichtiger Faktor. Die Bausätze gibt es zu unterschiedlichen Preisen und sie enthalten verschiedene Artikel. Der Preis sollte zum Budget passen und die Qualität der enthaltenen Komponenten, Sensoren und Aktuatoren berücksichtigen. Ein gutes Preis-Leistungs-Verhältnis wird erzielt, indem man den angemessensten Preis für die benötigten Funktionen herausfindet.
Erweiterbarkeit und Anpassbarkeit
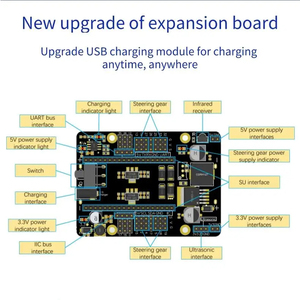
Funktionen, die Upgrades und Modifikationen in der Zukunft ermöglichen, sind wichtig. Dazu gehören Erweiterungsboards, Erweiterungsanschlüsse und eine Vielzahl kompatibler Komponenten. Dies ermöglicht dem Nutzer, mit dem Bausatz zu wachsen, neue Technologien auszuprobieren und fortgeschrittenere Projekte zu bauen. Diese Funktion trägt zur Langlebigkeit und zum Wert des Bausatzes bei.
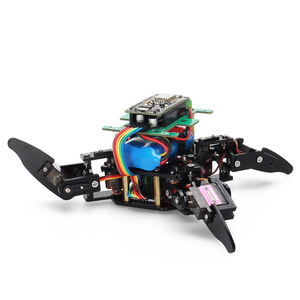
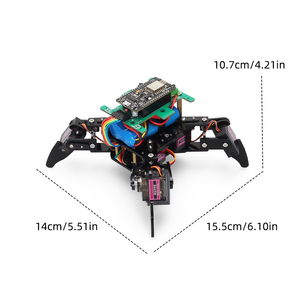
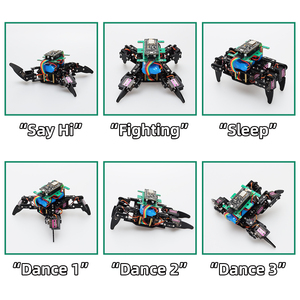
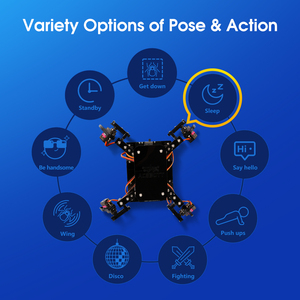
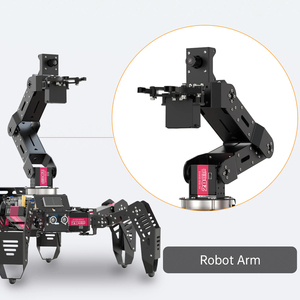
Das Design des Arduino-basierten Spinnenroboters ist eines seiner interessantesten Merkmale. Dieser Roboter hat einen Körper, der eine Spinne imitiert, und besteht je nach Art des Roboters aus sechs oder acht Beinen. Jedes Bein hat Gelenke, die aus Servomotoren bestehen, die es dem Roboter ermöglichen, sich zu bewegen. Der Einsatz von Servomotoren an den Beinen des Spinnenroboters erlaubt es dem Roboter, sich in alle Richtungen zu bewegen, genau wie eine echte Spinne. Der Roboter kann auch tanzen, gehen, sich drehen und andere Bewegungen ausführen. Der Spinnenroboter hat zudem ein einfaches Design, das aus einem Rahmen, einem Körper und Beinen mit Gelenken besteht. Der Rahmen kann aus Materialien wie Holz, Kunststoff oder Metall gefertigt werden. Er stützt den ganzen Körper des Roboters und hält alle seine Teile zusammen.
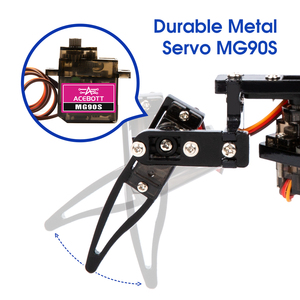
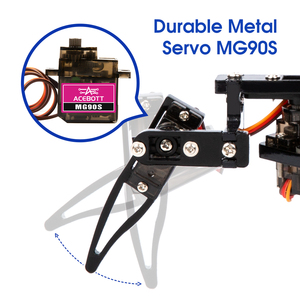
Der Arduino-Spinnenroboter hat viele Funktionen und Merkmale, die ihn interessant und vielseitig machen. Eines der Hauptmerkmale ist die Verwendung von Arduino als Hauptsteuerung. Arduino ist ein einfaches und benutzerfreundliches programmierbares Board, das dem Roboter hilft, zu funktionieren und verschiedene Aufgaben auszuführen. Es kann verwendet werden, um viele Arten von Robotern, einschließlich Spinnenrobotern, zu entwerfen, da es kostengünstig ist und viele Eingänge und Ausgänge hat. Ein weiteres wichtiges Merkmal des Spinnenroboters ist die Verwendung von Servomotoren an seinen Beinen. Servomotoren sind besonders, weil sie die Position und den Bewegungswinkel sehr präzise steuern können. Dies ermöglicht es dem Spinnenroboter, seine Beine auf realistische Weise zu bewegen, genau wie eine echte Spinne. Mit Servomotoren kann der Roboter gehen, rennen, kriechen und andere Bewegungen ausführen.
Darüber hinaus nutzt der Spinnenroboter Sensoren, um Objekte in seiner Umgebung zu erkennen und darauf zu reagieren. Zum Beispiel kann er einen Ultraschallsensor verwenden, um Entfernungen zu messen und Hindernisse in seinem Weg zu vermeiden. Dies ermöglicht es dem Roboter, neue Bereiche zu erkunden, ohne etwas zu treffen. Er kann auch andere Arten von Sensoren einsetzen, wie Temperatur-, Licht- oder Schallsensoren, um verschiedene Arten von Daten zu sammeln. Der Spinnenroboter kann auch über Bluetooth oder USB mit einem Smartphone oder Computer verbunden werden, um von diesen Geräten aus gesteuert zu werden.
Der Arduino-Spinnenroboter wird sorgfältig hergestellt, um sicherzustellen, dass er für alle Benutzer sicher ist. Er erfüllt die von verschiedenen Organisationen festgelegten Vorschriften und Richtlinien, um sicherzustellen, dass sein Design und seine Konstruktion korrekt sind. Dazu gehört die Erlangung von CE-Kennzeichnungen, RoHS-Konformität und die Einhaltung der AS/NZS-Normen. Die Roboter, die an Kinder verkauft werden, müssen Sicherheitsmerkmale aufweisen, um sie beim Spielen zu schützen. Sie sollten keine scharfen Kanten oder kleinen Teile haben, die schädlich sein können. Zudem sollten sie aus Materialien hergestellt sein, die langlebig sind und nicht leicht brechen.
Die Qualitätssicherung ist entscheidend bei der Herstellung von Arduino-Spinnenrobotern. Die Hersteller müssen die Qualität der Komponenten überprüfen, die zur Herstellung der Roboter verwendet werden, wie das Arduino-Board, die Motoren, die Sensoren und die Stromversorgung. Sie müssen auch die Qualität der Materialien sicherstellen, die zur Herstellung des Roboters verwendet werden. Dazu gehören Metall, Kunststoff oder andere Materialien. Vor dem Verkauf müssen die Hersteller die Qualität des Roboters testen, um sicherzustellen, dass er gut funktioniert und sicher ist. Sie sollten auch die Qualität der Anleitungen und Richtlinien überprüfen, die mit dem Roboter geliefert werden, einschließlich der Montageanleitung, der Programmieranleitung und der Wartungsanleitung.
Was sind die Vorteile von Arduino im Vergleich zu anderen?
In diesem Fall läuft der Spinnenroboter auf Arduino. Das bedeutet, dass alle Vorteile von Arduino auch hier zutreffen. Dazu gehören seine Einfachheit, niedrigen Kosten, Flexibilität und die Open-Source-Natur, um nur einige zu nennen. Die Open-Source-Natur ermöglicht es, die Designs einfach anzupassen und zu modifizieren.
Welche Rolle spielt Arduino im Spinnenroboter?
Arduino ist das Gehirn des Spinnenroboters. Es steuert und koordiniert alle Aktivitäten des Roboters. Dazu gehören die Bewegungen und Handlungen des Roboters. Der Roboter wird über eine benutzerfreundliche Oberfläche programmiert.
Welche Art von Sensor wird in Spinnenrobotern verwendet?
Spinnenroboter verwenden verschiedene Sensoren, abhängig von ihrer Aufgabe. Die häufigsten sind Ultraschall- und Infrarotsensoren. Diese beiden Sensortypen helfen dem Spinnenroboter, Hindernisse zu erkennen und zu vermeiden.
Wie hoch ist die maximale Geschwindigkeit von Spinnenrobotern?
Spinnenroboter bewegen sich mit Geschwindigkeiten von 1 m/s bis 10 m/s. Die Geschwindigkeit hängt von der Art des verwendeten Roboters ab. Beispielsweise bewegen sich Such- und Rettungsroboter schneller, um ein größeres Gebiet abzudecken. Roboter, die in anderen Bereichen eingesetzt werden, wie z.B. bei der Überwachung, bewegen sich langsamer, um genau zu arbeiten.



















