
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(529 Produkte verfügbar)




































































































































































 Sofort lieferbar
Sofort lieferbar




 Sofort lieferbar
Sofort lieferbar



 Sofort lieferbar
Sofort lieferbar
















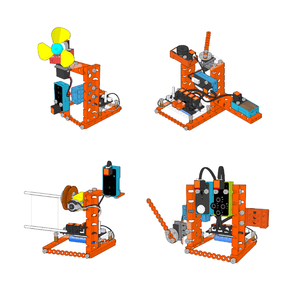
Es gibt verschiedene Arten von Arduino Fahrzeugrobotern, die helfen, das Konzept des Arduino Fahrzeugroboters zu demonstrieren. Einige davon sind wie folgt:
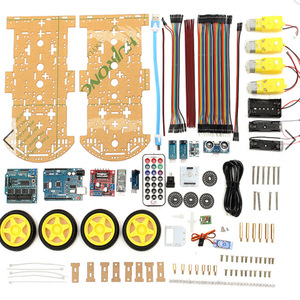
Einfaches Arduino-Auto:
Dieser Roboter wird von einem einfachen Arduino-Board gesteuert, einem kostengünstigen Mikrocontroller. Er funktioniert mit wenigen einfachen Teilen, wie einem Motor-Treiber-Shield oder einem L298P-Modul, das die Motoren mit Strom versorgt und steuert, wie sie sich bewegen. Lego-basierte Roboter machen es einfach, sie zusammenzubauen. Anstelle von normalen Rädern verwenden sie oft Räder, die auf fast jeder Oberfläche fahren können. So kann der Roboter frei drinnen oder draußen herumsausen, ohne an einem Ort festzustecken.
Linienfolgeauto:
Das Linienfolgeauto ist etwas komplexer als das einfache Arduino-Auto. Es fügt Sensoren hinzu, die dem Roboter helfen, einer dunklen Linie auf einer helleren Oberfläche zu folgen. In der Regel werden zwei Arten von Sensoren verwendet: Infrarotsensoren (IR) und Lichtsensoren. Zu diesem Zweck wird vor allem ein IR-Sensormodul für das Auto verwendet. Das Auto muss die Eingaben dieser Sensoren verwenden, um herauszufinden, wo sich die Linie befindet, und sich selbst steuern, um darauf zu bleiben. Der Roboter muss so programmiert sein, dass er interpretiert, was die Sensoren erkennen, und darauf reagiert, indem er die Richtung ändert, in die er sich bewegt.
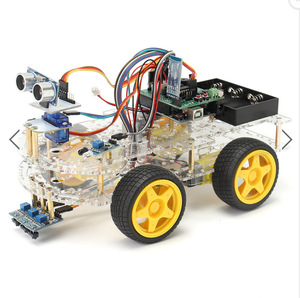
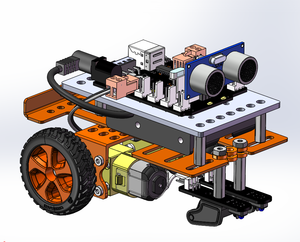
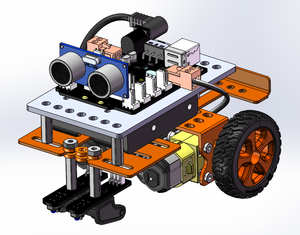
Hindernisvermeidendes Auto:
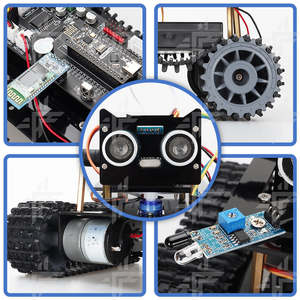
Ein mit Arduino gebautes Hindernisvermeidendes Auto geht noch einen Schritt weiter, indem es Entfernungsmessgeräte, die als Ultraschallsensoren bekannt sind, integriert. Eine beliebte Option ist der HC-SR04 Arduino Ultraschallsensor. Er funktioniert, indem er Schallwellen aussendet und dann die Zeit misst, die die Echos benötigen, um zurückzukommen. So kann der Roboter feststellen, wie weit Objekte entfernt sind. Das Hauptziel dieser Ultraschallsensoren ist es, alle Hindernisse zu erkennen, die sich beim Fahren vor dem Auto befinden könnten. Die Sensoren geben ständig Feedback darüber, was sich vor dem Fahrzeug befindet, und diese Informationen sind entscheidend für das ordnungsgemäße Funktionieren des Roboters. Mit dem Feedback der Ultraschallsensoren kann das Arduino-Auto vermeiden, gegen Dinge zu fahren, indem es seinen Weg entsprechend ändert.
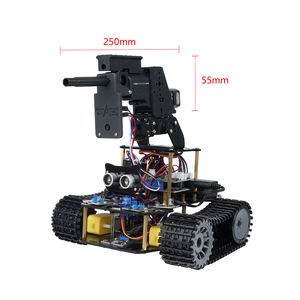
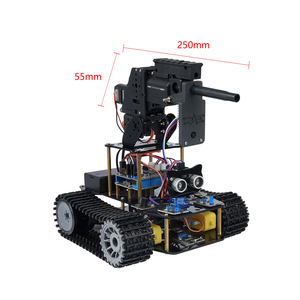
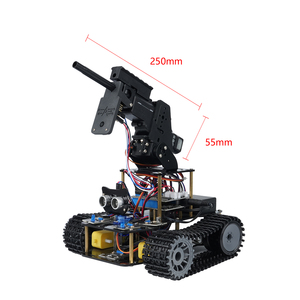
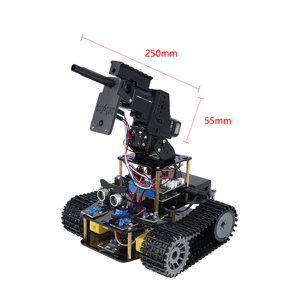
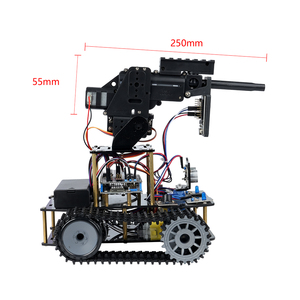
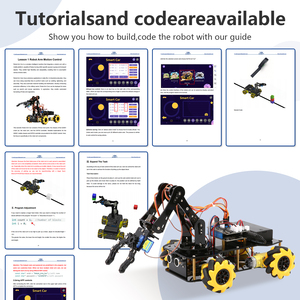
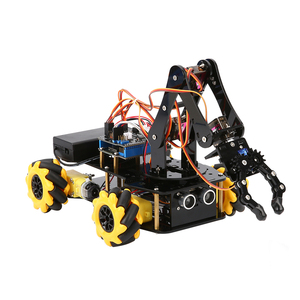
Roboterarmfahrzeug:
Das Roboterarmfahrzeug nimmt ein noch komplexeres Design an, indem es einen voll funktionsfähigen Roboterarm hinzufügt. Dieser Arm wird über ein Arduino-Board präzise und präzise gesteuert und programmiert, so dass er verschiedene Aufgaben nach Bedarf ausführen kann. Ausgestattet mit einer Vielzahl von austauschbaren, spezialisierten Werkzeugen, die ihm zur Verfügung stehen, kann der Roboterarm zahlreiche praktische Anwendungen und Funktionen übernehmen. Egal, ob es darum geht, etwas zu greifen, zu heben, zu platzieren oder mit Leichtigkeit und Präzision zu handhaben, der Arm kann alles. Seine Vielseitigkeit kommt von den verschiedenen angeschlossenen Gadgets, die es ihm ermöglichen, an verschiedenen Aufgaben zu arbeiten. Die Bewegungen des Arms werden alle von den codierten Befehlen gesteuert, die vom kleinen computerähnlichen Gehirn des Fahrzeugs – dem Arduino-Board – gesendet werden.
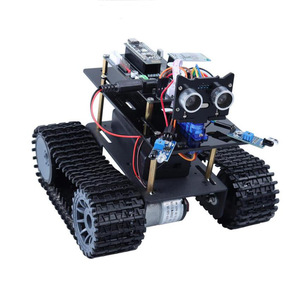
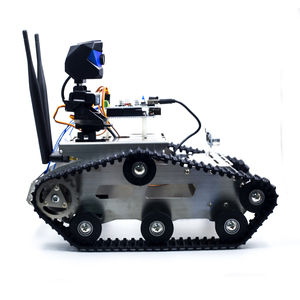
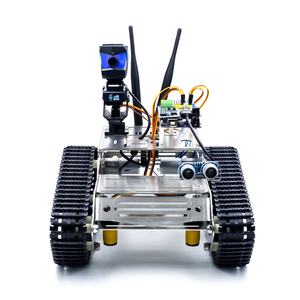
Überwachungsroboter:
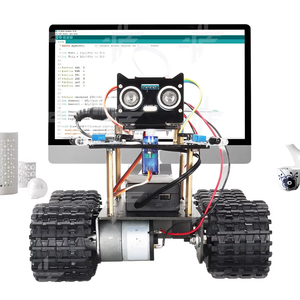
Dies ist eine fortschrittlichere Art von Arduino-Roboterauto. Es ist speziell für die Überwachung von Bereichen und die Suche nach ungewöhnlichen oder verdächtigen Dingen konzipiert. Der Überwachungsroboter ist mit Hightech-Teilen ausgestattet, die es ihm ermöglichen, selbstständig herumzulaufen und gleichzeitig seine Umgebung zu überwachen. Zwei wichtige Teile dieses Überwachungssystems sind eine Kamera und Bewegungssensoren. Der Bewegungssensor erkennt, ob sich etwas in der Nähe bewegt, und die Kamera zeichnet Videos von dem auf, was passiert. Alle diese Informationen, die während der Patrouille des Roboters gesammelt werden, werden live über das Internet an Personen gesendet, die sich überall auf der Welt befinden können. Sie können den Videofeed des Roboters in Echtzeit direkt von ihren webverbundenen Geräten wie Computern oder Smartphones aus ansehen. So können sie sofort sehen und auf das reagieren, was der Roboter sieht, was ihn zu einem wertvollen Werkzeug für die Fernüberwachung und Sicherheit macht.
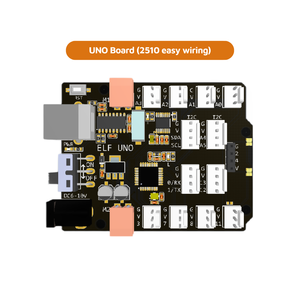
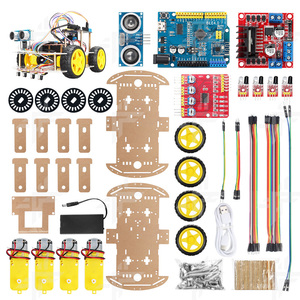
Verschiedene Spezifikationen des Arduino-Roboterauto-Kits können berücksichtigt werden, um spezifische Projektbedürfnisse zu erfüllen. Einer der wichtigsten Aspekte ist die Kompatibilität mit verschiedenen Arduino-Boards. Während das Arduino Uno eine sehr beliebte Wahl ist, können einige Kits die Verwendung anderer Arduino-Boards ermöglichen, die als Gehirn des Roboterautos dienen.
Das Antriebssystem ist ein weiterer Bereich, in dem sich die Spezifikationen unterscheiden können. Einige Kits verwenden ein Zwei-Rad-Antriebssystem mit Lenkrädern zum Ausbalancieren, während andere sich für ein Vier-Rad-Antriebssystem entscheiden, um eine bessere Stabilität und Kontrolle zu gewährleisten.
Die Sensoren, die dem Roboter helfen, die Umgebung zu verstehen, können stark variieren. Während die meisten Arduino-Roboterauto-Kits grundlegende Ultraschallsensoren zur Entfernungsmessung enthalten, können fortschrittlichere Kits die Möglichkeit bieten, Linienverfolgungs-, Infrarot- oder sogar LIDAR-Sensoren einzubeziehen.
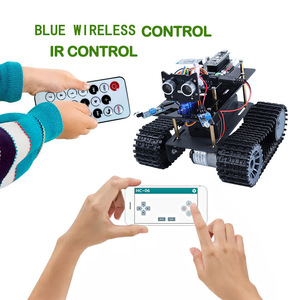
Das im Roboterauto-Kit verwendete Kommunikationsmodul wird ebenfalls unterschiedlich sein. Viele verwenden Bluetooth, um mit Befehlen der mobilen App zu kommunizieren, während einige RF-Module, Wi-Fi oder sogar autonome vorprogrammierte Aktionen verwenden können.
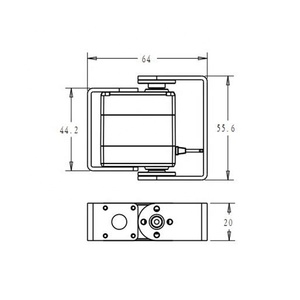
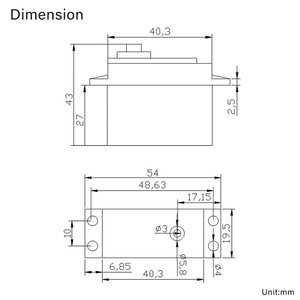
Andere Spezifikationen, die angepasst werden können, sind die Anzahl der Motoren und Encoder, die im Design verwendet werden, die Materialien und die Größe des Chassis, die Stromquelle, die zum Antrieb des Roboters verwendet wird, und die Art des Servos, die für bestimmte Anwendungen wie die Geschwindigkeitsüberwachung verwendet wird.
Die Langlebigkeit und Lebensdauer eines Produkts können durch die Wartung, die es durchläuft, erheblich beeinflusst werden. Es ist unbedingt erforderlich, das Arduino-Auto mit Sorgfalt zu behandeln, da häufige Reparaturen keine gute Option sind, insbesondere bei komplexen Modellen. Zunächst sollten die Komponenten des Autos genau geprüft werden. Die regelmäßige Reinigung sollte das Entfernen von Rückständen, Staub oder Schmutz umfassen, die sich im Laufe der Zeit ansammeln, um langfristige Schäden am Fahrzeug zu vermeiden.
Es sollte eine gründliche Überprüfung durchgeführt werden, um festzustellen, ob Teile lose sind und eine Nachziehen erforderlich ist. Dies ist besonders wichtig bei den Rad- und Motorbefestigungen. Alle heruntergefallenen oder verlegten Komponenten sollten sofort ersetzt werden, um eine sichere und einwandfreie Funktion zu gewährleisten. Die Schmierung von drehenden Teilen trägt dazu bei, die Reibung zu reduzieren und die Bewegung geschmeidiger zu machen.
Ein besonderer Fokus muss auf die Stromquelle gelegt werden. Es muss sichergestellt werden, dass der Akku ausreichend geladen ist und es keine Probleme mit den Anschlüssen gibt. Schließlich sollte eine ordnungsgemäße Programmierung und Prüfung des Codes durchgeführt werden, um sicherzustellen, dass die Befehle nahtlos durchlaufen und das Fahrzeug wie erwartet reagiert.
Robotik-Ausbildung
Robotik-Kits für Anfänger verwenden oft ein kleines Fahrzeug als Plattform, um die Grundlagen der Robotik, Programmierung und Elektronik zu lehren. Kundenspezifische Arduino-Fahrzeuge bieten Schülern praktische Erfahrungen, indem sie ihren ersten Roboter von Grund auf neu bauen.
Laborassistent
Ein Arduino-Roboterauto kann Geräte, Proben und kleine Ladungen zwischen vorgegebenen Orten bewegen. Er folgt einem festgelegten Weg und befördert Vorräte mit minimaler Aufsicht.
Touren
Roboterautos mit einer Kamera können als automatisierter Reiseleiter fungieren. Er fährt entlang eines vorgegebenen Weges und nimmt gleichzeitig Bilder auf oder streamt Videoaufnahmen, um Benutzern Informationen über die Sehenswürdigkeit oder den Standort zu liefern.
Verfolgung von Outdoor-Aktivitäten
Ein Arduino-basiertes Fahrzeug kann bei der Überwachung von Outdoor-Aktivitäten helfen, indem es sich zu bestimmten Orten bewegt, die Bewegung von Personen oder Gruppen im Freien verfolgt und Daten über besuchte Orte, zurückgelegte Distanzen und die in jedem Ort verbrachte Zeit sammelt.
Überwachung
Ein Arduino-basierter Roboter kann unabhängig ein bestimmtes Gebiet patrouillieren. Er kann einer vorgegebenen Route folgen, die Umgebung überwachen und eine Überwachungskamera oder andere Sensoren zur Fernüberwachung tragen.
Kindertherapeut
Für Kinder mit Behinderungen kann ein Arduino-Roboterauto als Therapiemittel verwendet werden. Es kann so angepasst werden, dass es die physische Interaktion motiviert und die Entwicklung der Bewegung und die Hand-Augen-Koordination fördert.
Hotellerie-Service
Ein Arduino-Roboterfahrzeug kann Gegenstände wie Lebensmittel, Medikamente und Verbrauchsmaterialien innerhalb einer Gesundheitseinrichtung liefern. Es verbessert die Patientenversorgung, indem es den Kontakt zwischen Personal und Verbrauchsmaterialien reduziert und die Verbreitung von Infektionen minimiert.
Forschung und Exploration
Ein Arduino-Roboterfahrzeug kann verwendet werden, um Gebiete in Außenumgebungen zu erkunden und zu untersuchen, die abgelegen oder schwer zugänglich sind. Es kann auch von Wissenschaftlern verwendet werden, um Daten und Proben an Orten zu sammeln, die weit entfernt vom Labor liegen.
Luftqualitätsmonitor
Ein Arduino-Fahrzeug kann mit einem Luftqualitätssensor ausgestattet werden, um die Schadstoffbelastung zu messen, z. B. CO2, PM2.5 und andere Gase. So kann die Luftqualität beurteilt und die Identifizierung von Umweltverschmutzungs-Hotspots an verschiedenen Orten ermöglicht werden.
Zweck und Anwendung:
Bei der Auswahl eines Arduino-Roboterautos ist es wichtig, den beabsichtigten Einsatz und die Anwendung zu berücksichtigen. Fragen Sie, welche Aufgaben der Roboter ausführen soll. Wird er verwendet, um unbekanntes Gelände zu erkunden, an Linienfolge-Wettbewerben teilzunehmen oder als Überwachungsfahrzeug zu fungieren? Verschiedene Zwecke können spezifische Merkmale erfordern, wie z. B. die Notwendigkeit der Hinderniserkennung oder die Fähigkeit zur autonomen Navigation. Indem man das Design des Roboters auf seine beabsichtigte Anwendung abstimmt, können Benutzer ein Fahrzeug auswählen, das in seinem speziellen Bereich überragende Leistungen erbringt und ihre funktionalen Anforderungen erfüllt.
Sensorintegration:
Autos, die Arduino verwenden, werden mit verschiedenen Sensoren geliefert, die ihre Funktionalität verbessern. Bei der Auswahl des Roboters ist es wichtig, die Arten von Sensoren zu berücksichtigen, die in das Fahrzeug integriert sind. Einige Fahrzeuge verfügen möglicherweise über Ultraschallsensoren zur Entfernungsmessung und Hindernisvermeidung, während andere Infrarotsensoren für Liniendetektions- oder Lichtfolgeanwendungen enthalten. Durch die Auswahl eines Roboters mit der entsprechenden Sensorintegration für eine bestimmte Aufgabe können Benutzer sicherstellen, dass das Fahrzeug über die Wahrnehmungsfähigkeiten verfügt, die für eine erfolgreiche Navigation und Interaktion mit seiner Umgebung erforderlich sind.
Kommunikationsmodule:
Kommunikationsmodule spielen eine wichtige Rolle bei der Ermöglichung der Interaktion zwischen dem Arduino Fahrzeugroboter und externen Geräten. Diese Module ermöglichen die Fernsteuerung, Überwachung oder den Datenaustausch mit dem Roboter. Berücksichtigen Sie bei der Auswahl eines Arduino-Fahrzeugs die Art des mitgelieferten Kommunikationsmoduls. Häufige Optionen sind Wi-Fi-Module für die Cloud-Konnektivität und Bluetooth-Module für die Kurzstreckenkommunikation mit Smartphones oder anderen Handheld-Geräten. Die Auswahl eines Fahrzeugs mit einem geeigneten Kommunikationsmodul stellt eine nahtlose Verbindung und Steuerung zwischen dem Roboter und dem Benutzer sicher, wodurch verschiedene Ebenen der Interaktion und Interaktion ermöglicht werden.
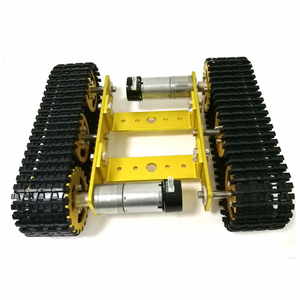
Roboterchassis:
Die Wahl des Roboterchassis ist entscheidend für die Bestimmung der physischen Struktur und Mobilität des Fahrzeugs. Es stehen verschiedene Roboterchassis-Designs zur Verfügung, die auf spezifische Bedürfnisse und Anwendungen abgestimmt sind. So kann ein zweirädriges Arduino-Roboterauto-Chassis für einfache Navigationsaufgaben oder Wettbewerbe geeignet sein, während ein Arduino 4WD-Roboterchassis eine verbesserte Manövrierfähigkeit und Anpassungsfähigkeit an verschiedene Gelände bietet. Berücksichtigen Sie die Anforderungen der jeweiligen Aufgabe und wählen Sie ein Roboterchassis, das die notwendige Stabilität, Kontrolle und Vielseitigkeit für einen erfolgreichen Betrieb in der vorgesehenen Umgebung bietet.
F1: Was sind die Vorteile eines Arduino-Roboterautos?
A1: Ein Arduino-Roboterauto kann so angepasst werden, dass es viele verschiedene Dinge lehrt. Dadurch fördert es kreatives Denken und Problemlösungsfähigkeiten bei Kindern und Schülern. Das Design des Fahrzeugs verbessert das praktische Lernen.
F2: Kann sich ein Arduino-Roboterauto mit dem Internet verbinden?
A2: Ja, das ist möglich, indem man ein Arduino-GSM-Modul oder ein Arduino-Wi-Fi-Shield verwendet. Diese Komponenten ermöglichen es dem Roboterauto, Befehle von einer webbasierten Anwendung zu empfangen oder Daten an einen Cloud-Server zu senden.
F3: Wie schnell kann sich ein Arduino-Roboterauto bewegen?
A3: Die Geschwindigkeit des Fahrzeugs hängt vom Motortreiber, Motor, Autochassis und anderen Faktoren ab. Im Allgemeinen kann sich ein Arduino-Roboterauto mit einer Geschwindigkeit von 0,1 bis 1 m/s bewegen.
F4: Welche Programmiersprache verwendet ein Arduino-Auto?
A4: Die Arduino-Plattform verwendet die Arduino-IDE zur Programmierung, die auf einer vereinfachten Version von C und C plus basiert.



















