
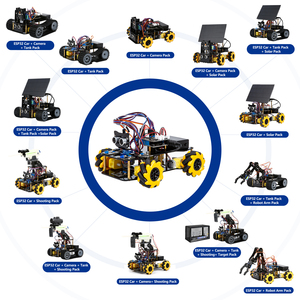
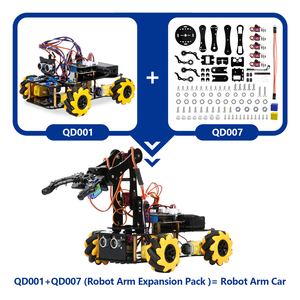
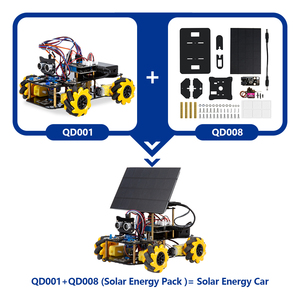
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(1615 Produkte verfügbar)













 Sofort lieferbar
Sofort lieferbar























 Sofort lieferbar
Sofort lieferbar












 Sofort lieferbar
Sofort lieferbar































 Sofort lieferbar
Sofort lieferbar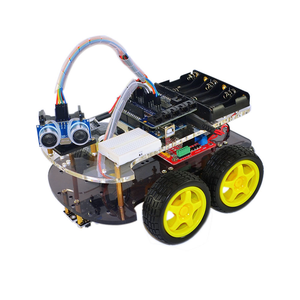







 Sofort lieferbar
Sofort lieferbar






 Sofort lieferbar
Sofort lieferbar







































 Sofort lieferbar
Sofort lieferbar

















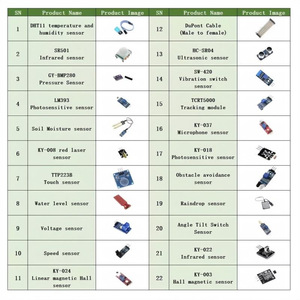
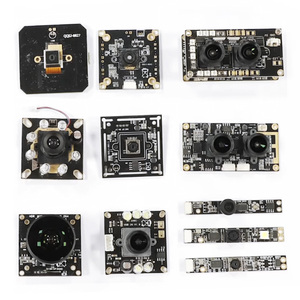
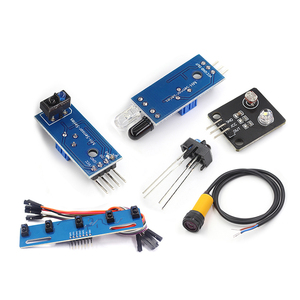
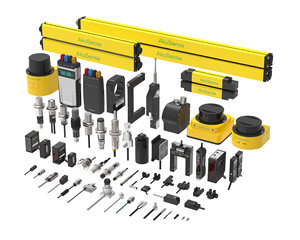
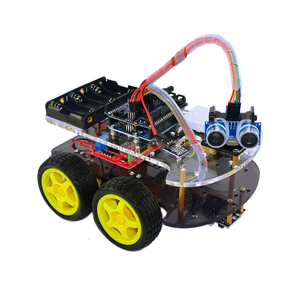
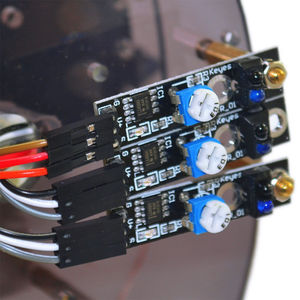
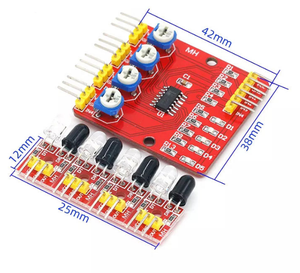
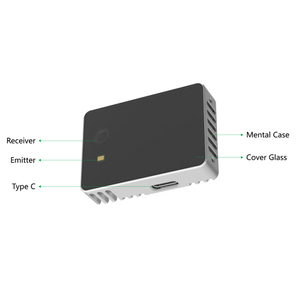
Robotersensoren sind ein integraler Bestandteil des täglichen Lebens. Sensoren sind in Handys, modernen Geräten und natürlich in Robotern integriert. Robotersensoren gibt es in verschiedenen Typen, von denen jeder darauf ausgelegt ist, spezifische physikalische Bedingungen zu erfassen und die Umwelt unterschiedlich wahrzunehmen. Hier sind einige gängige Typen von Robotersensoren:
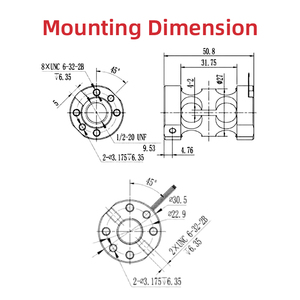
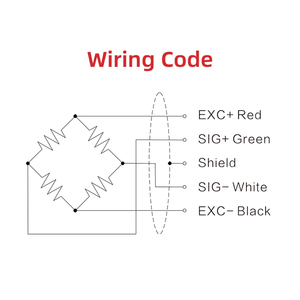
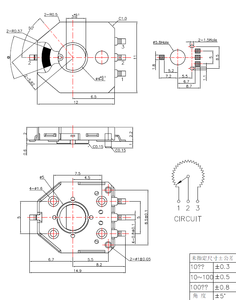
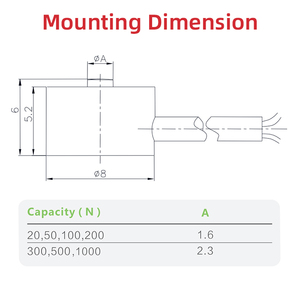
Hersteller von Robotersensoren stellen detaillierte technische Daten zur Verfügung, um den Benutzern ein Verständnis für ihre Fähigkeiten und Einschränkungen zu ermöglichen. Nachfolgend sind einige der technischen Daten von Robotersensoren aufgeführt.
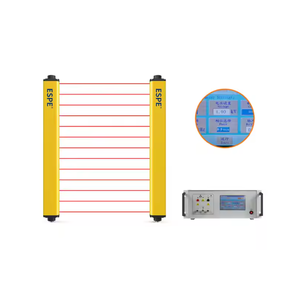
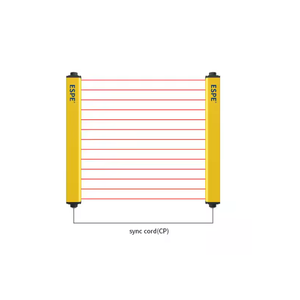
Reichweite
Jeder Sensor hat eine minimale und maximale Entfernung, in der er ein Objekt erkennen kann. Die Reichweite ist eine wichtige technische Spezifikation für alle Robotersensoren. Sie hilft dem Benutzer, die funktionalen Grenzen des Sensors zu verstehen.
Auflösung
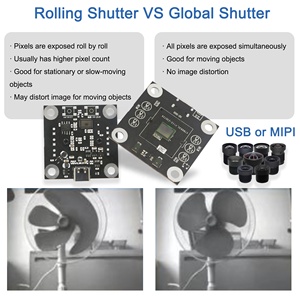
Die Auflösung bezieht sich auf die kleinste messbare Veränderung, die ein Sensor erkennen kann. Zum Beispiel kann ein Temperatursensor mit hoher Auflösung selbst geringfügige Temperaturunterschiede erkennen und melden. Bei visuellen Sensoren wie Kameras wird die Auflösung in Pixeln angegeben.
Sichtfeld
Das Sichtfeld ist für visuelle Sensoren wie Kameras relevant. Es ist das Ausmaß der beobachtbaren Umgebung, die ein Sensor zu einem Zeitpunkt erfassen kann. Das Sichtfeld wird in Grad gemessen. Es beeinflusst die Fähigkeit der Kamera, ein größeres Gebiet zu überwachen. Eine Kamera mit einem größeren Sichtfeld kann ein größeres Gebiet abdecken als eine mit einem schmalen Sichtfeld.
Genauigkeit
Jeder Sensor hat eine Fehlerquote. Die Genauigkeitsspezifikation zeigt den Grad der Abweichung vom tatsächlichen Wert, den der Sensor messen kann. Zum Beispiel könnte ein Drucksensor eine Genauigkeit von ±1 psi haben. Das bedeutet, dass er den Druck mit einer Abweichung von einem Pfund pro Quadratzoll vom tatsächlichen Wert messen kann.
Frequenzgang
Der Frequenzgang ist eine Spezifikation für Sensoren, die Signale mit zeitlichen Variationen messen. Er zeigt die Fähigkeit des Sensors an, unterschiedliche Frequenzen des gemessenen Signals zu erkennen und darauf zu reagieren. Zum Beispiel kann ein Mikrofon mit gutem Frequenzgang hohe und tiefe Klangfrequenzen erfassen.
Latenz
Latenz ist die Zeit, die ein Sensor benötigt, um Daten zu verarbeiten und sie an den Robotercontroller zu senden. Hohe Latenz kann die Reaktionszeit verlangsamen und die Leistung des Roboters beeinträchtigen. Zum Beispiel kann die Sensorlatenz bei autonomen Fahrzeugen den Roboter in der Entscheidungsfindung beim Fahren verzögern.
Robustheit
Robustheit ist die Fähigkeit des Sensors, rauen Umweltbedingungen standzuhalten, wie z.B. extremen Temperaturen, Staub, Feuchtigkeit und chemischer Einwirkung. Beispielsweise kann ein wetterfester Sensor in nassen und feuchten Bedingungen ohne Schäden funktionieren.
Energieverbrauch
Energieverbrauch ist eine wichtige Spezifikation für batteriebetriebene Roboter. Er misst die Energiemenge, die der Sensor für seinen Betrieb benötigt. Sensoren mit geringem Energieverbrauch sind ideal für Anwendungen, bei denen eine lange Batterielebensdauer erforderlich ist.
Nachfolgend sind einige allgemeine Wartungspraktiken für Robotersensoren aufgeführt.
Regelmäßige Reinigung
Regelmäßige Reinigung hilft, Staub und Ablagerungen von den Sensoren zu entfernen. Zum Beispiel kann Schmutz auf den optischen Sensoren ihre Fähigkeit zur Lichtwahrnehmung beeinträchtigen und ihre Effizienz verringern. Verwenden Sie die empfohlenen Reinigungsmittel und -methoden, um Schäden am Sensor während der Reinigung zu vermeiden.
Kalibrierung
Die Kalibrierung stellt sicher, dass die Sensoren ihre Genauigkeit im Laufe der Zeit beibehalten. Befolgen Sie die Anweisungen des Herstellers zur Kalibrierung der Sensoren. Einige Sensoren erfordern eine Kalibrierung nach einem bestimmten Zeitraum oder nach Verwendung unter unterschiedlichen Umweltbedingungen.
Inspektion
Regelmäßige Inspektionen beinhalten die visuelle Überprüfung der Sensoren auf Anzeichen von Schäden, Abnutzung oder Verschleiß. Achten Sie auf lose Verbindungen, Risse und das Eindringen von Feuchtigkeit. Ersetzen oder reparieren Sie beschädigte Sensoren sofort, um die optimale Leistung des Roboters aufrechtzuerhalten.
Softwareupdates
Einige Sensoren erfordern regelmäßige Softwareupdates zur Verbesserung ihrer Leistung und Zuverlässigkeit. Befolgen Sie die Anweisungen des Herstellers zur Durchführung von Softwareupdates. Verwenden Sie nur die empfohlenen Aktualisierungswerkzeuge und -methoden.
Umweltüberlegungen
Die Umweltbedingungen, unter denen die Sensoren betrieben werden, wirken sich auf ihre Lebensdauer und Leistung aus. Schützen Sie die Sensoren vor extremen Temperaturen, Feuchtigkeit, Staub und anderen rauen Bedingungen, die ihre spezifizierten Grenzen überschreiten. Installieren Sie Schutzhüllen wie Abdeckungen und Gehäuse, um Schäden durch Umwelteinflüsse zu verhindern.
Bei der Auswahl der richtigen Sensoren für einen Roboter gibt es mehrere Faktoren zu berücksichtigen:
Berücksichtigen Sie die Anwendung
Was ist der Zweck des Roboters? Zum Beispiel, ist er für industrielle Anwendungen, Dienstleistungen oder Forschung gedacht? Verschiedene Anwendungen können unterschiedliche Sensorkapazitäten erfordern.
Umweltbedingungen
Was sind die Umweltbedingungen, unter denen der Roboter betrieben wird? Zum Beispiel gibt es extreme Temperaturen, Feuchtigkeit oder Staub? Es ist wichtig, Sensoren auszuwählen, die diesen Bedingungen standhalten können.
Sensorfusion
Manchmal kann die Verwendung mehrerer Sensoren unterschiedlicher Typen umfassendere Sensorkapazitäten bieten. Dies wird als Sensorfusion bezeichnet. Es ist wichtig, die verfügbaren Verarbeitungs- und Integrationsmöglichkeiten des Roboters zu berücksichtigen.
Kosten und Komplexität
Fortschrittlichere Sensoren können teuer sein und die Komplexität des Roboters erhöhen. Es ist wichtig, die Sensorkapazitäten im Verhältnis zu Kosten und Komplexität entsprechend den Bedürfnissen des Roboters abzuwägen.
Robotersensoren sind ein entscheidendes Element eines jeden Roboters, daher ist es wichtig, ein grundlegendes Verständnis für sie zu haben. Auch wenn es nicht ratsam ist, Reparaturen oder den Austausch von Robotersensoren ohne die erforderlichen Fähigkeiten vorzunehmen, ist es möglich, einige Arten von Robotersensoren zu ersetzen, wie z. B. einen einfachen Lichtsensor (LDR) oder einen allgemeinen Proximitätsensor (IR) wie die PixyCam.
Bevor Sie versuchen, einen Robotersensor auszutauschen, stellen Sie sicher, dass die erforderlichen Werkzeuge verfügbar sind. Dazu gehören ein Lötkolben und Lot, eine Entlötpumpe, Drahtschneider und Schraubendreher. Es hilft auch, über grundlegende Kenntnisse in Elektronik und Programmierung zu verfügen.
Um einen Robotersensor auszutauschen, schalten Sie zuerst den Roboter aus. Öffnen Sie das Gehäuse des Roboters, um die Sensoren freizulegen. Entfernen Sie vorsichtig den alten Sensor, indem Sie ihn mit einer Entlötpumpe von der Leiterplatte ablöten. Schließen Sie den neuen Sensor mit Lötkolben und Lötzinn an die Leiterplatte an. Überprüfen Sie anschließend, ob der Sensor ordnungsgemäß funktioniert, indem Sie den Roboter einschalten und seine Funktionalität testen. Nach dem Test schließen Sie das Gehäuse des Roboters wieder.
Mit diesem einfachen Leitfaden ist der Austausch von Robotersensoren, die nicht zu komplex sind, machbar. Für komplexere Sensoren wie LiDAR oder kamerabasierten Systeme ist es am besten, die Dokumentation des Herstellers zu konsultieren oder professionelle Hilfe in Anspruch zu nehmen.
Frage 1: Was sind die Unterschiede zwischen aktiven und passiven IR-Sensoren?
Antwort 1: Aktive IR-Sensoren senden Infrarotstrahlung aus und warten auf zurückkommende Signale, während passive IR-Sensoren nur die von Objekten ausgestrahlte Infrarotstrahlung erkennen, ohne eigene auszusenden.
Frage 2: Welche Rolle spielen Robotersensoren in der Automatisierung?
Antwort 2: Robotersensoren in der Automatisierung helfen, Veränderungen in der Umgebung zu erkennen, wodurch Roboter in der Lage sind, fundierte Entscheidungen zu treffen und Aufgaben genau und sicher auszuführen.
Frage 3: Können Roboter sinnliche Fähigkeiten wie Menschen haben?
Antwort 3: Nein, aber sie sind mit Sensoren ausgestattet, die menschliche Sinne wie Berührung, Sehen und Hören nachahmen, um mit der Umgebung zu interagieren.
Frage 4: Was ist ein sensorbasierter Roboter?
Antwort 4: Ein sensorbasierter Roboter ist ein Roboter, der mit Sensoren ausgestattet ist, die ihm ermöglichen, seine Umgebung wahrzunehmen und auf Veränderungen in dieser Umgebung zu reagieren.



















