
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(603 Produkte verfügbar)




 Sofort lieferbar
Sofort lieferbar








 Sofort lieferbar
Sofort lieferbar




















 Sofort lieferbar
Sofort lieferbar









 Sofort lieferbar
Sofort lieferbar











 Sofort lieferbar
Sofort lieferbar















 Sofort lieferbar
Sofort lieferbar


































 Sofort lieferbar
Sofort lieferbar









 Sofort lieferbar
Sofort lieferbar








 Sofort lieferbar
Sofort lieferbar


















































Es gibt verschiedene Arten von Servos, aus denen Sie bei der Konstruktion eines Roboters mit einer Arduino-Servomotor-Steuerung wählen können. Die Auswahl des geeigneten Typs hängt von der jeweiligen Anwendung und dem gewünschten Grad der Steuerung ab. Hier ist eine Aufschlüsselung einiger der gängigen Typen:
Standard-Servos
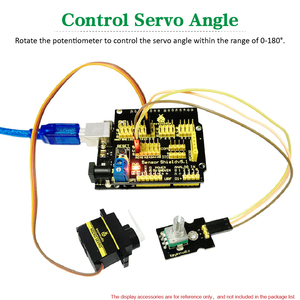
Dies sind die am häufigsten verwendeten Typen. Sie haben einen Bewegungsspielraum von 180 Grad. Sie werden gesteuert, indem die Pulsbreite des von Arduino gesendeten Signals variiert wird. Standard-Servos werden oft in Anwendungen eingesetzt, die die Positionierung von Armen, Beinen oder anderen Teilen eines Spielzeugs erfordern. Sie werden in ferngesteuerten Autos zur Steuerung der Lenkung oder in Linienfolge-Robotern zur Steuerung der Räder eingesetzt. Dies liegt daran, dass sie einfach zu bedienen sind. Sie sind erschwinglich und bieten eine zuverlässige Positionierung innerhalb ihres Bewegungsspielraums. Sie bieten jedoch keine kontinuierliche Rotation oder präzise Positionierung außerhalb ihres Bereichs.
Servos mit kontinuierlicher Rotation
Diese Servotypen ermöglichen eine ununterbrochene 360-Grad-Bewegung. Sie werden gesteuert, indem die Spannung geändert wird, die von Arduino gesendet wird. Servos mit kontinuierlicher Rotation sind ideal für Anwendungen wie Roboter-Räder oder bewegliche Teile, die eine kontinuierliche Bewegung erfordern. Sie werden in Robotern zur Steuerung der Vorwärts- und Rückwärtsbewegung oder in automatisierten Maschinen zum Antrieb von Förderbändern eingesetzt. Im Gegensatz zu Standard-Servos bieten sie keine präzise Positionssteuerung. Stattdessen bieten sie eine Geschwindigkeitsregelung für eine kontinuierliche Bewegung. Sie sind jedoch möglicherweise nicht für Aufgaben geeignet, die eine präzise Positionierung oder ein Anhalten in bestimmten Winkeln erfordern.
Digitale Servos
Diese Servotypen verfügen über eine digitale Schaltung und einen Mikroprozessor. Sie werden eingesetzt, um die Genauigkeit, Geschwindigkeit und Leistung zu verbessern. Digitale Servos bieten eine bessere Positionierungshaltung, schnellere Reaktionszeiten und eine präzisere Steuerung als analoge Servos. Sie werden in Hochleistungsanwendungen eingesetzt, die Präzision erfordern, beispielsweise in Drohnen, Robotern und RC-Fahrzeugen. Sie bieten eine bessere Leistung in Bezug auf Genauigkeit, Geschwindigkeit und Drehmoment. Sie sind jedoch teurer als analoge Servos.
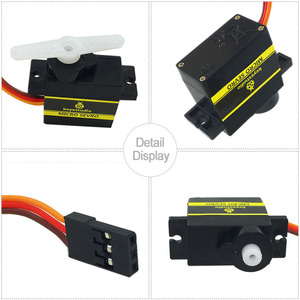
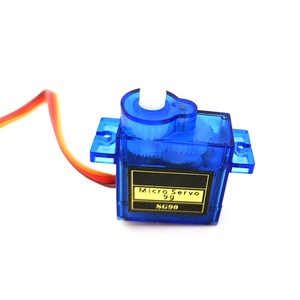
Mini-Servos
Diese Servotypen sind kleiner. Sie bieten weniger Drehmoment, sind aber nützlich für Anwendungen, bei denen der Platz begrenzt ist. Mini-Servos werden in kleinen Robotern, kompakten Maschinen oder Modellen mit begrenztem Platz für Komponenten eingesetzt. Sie sind einfach zu steuern, leicht und passen in kleine Räume. Sie haben jedoch ein begrenztes Drehmoment und einen Bewegungsspielraum im Vergleich zu Standard- oder größeren Servos.
Drehmomentanforderungen
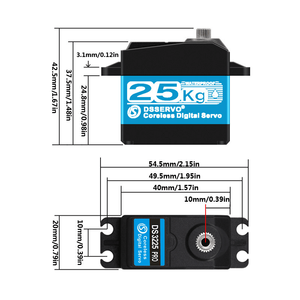
Um einen Servomotor auszuwählen, ist das Drehmoment, das zum Bewegen der Last benötigt wird, entscheidend. Es basiert auf dem Gewicht der Last und dem Abstand zur Servowelle. Für schwerere Lasten oder größere Armlängen wird ein Servomotor mit hohem Drehmoment benötigt. Umgekehrt reicht ein geringeres Drehmoment für leichtere Lasten oder kürzere Arme aus. So wird sichergestellt, dass der Servomotor ausreicht, um die Last zu bewegen, ohne sie zu belasten.
Servotyp
Es gibt drei Arten von Servomotoren: Standard, kontinuierlich und Mehrumdrehungen. Servomotoren mit kontinuierlicher Rotation sind für das Drehen von Rädern oder das Bewegen von Teilen in einer geraden Linie gedacht. Mehrumdrehungs-Servomotoren sind für Anwendungen geeignet, die mehr als eine volle Drehung erfordern. Die Anwendung bestimmt den zu verwendenden Typ.
Geschwindigkeit
Die Geschwindigkeit ist die Zeit, die zum Drehen um einen bestimmten Winkel benötigt wird. Ein Hochgeschwindigkeitsservo ist für Anwendungen gedacht, die schnelle Bewegungen erfordern. Umgekehrt ist ein Niedriggeschwindigkeitsservo für Aufgaben geeignet, die mehr Präzision erfordern.
Spannung
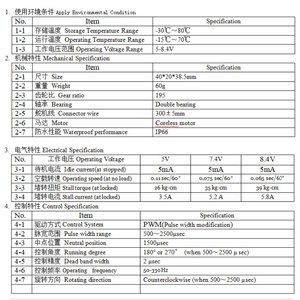
Die Spannungsspezifikation des Servos sollte mit der Stromversorgung übereinstimmen. So wird sichergestellt, dass der Servo effizient arbeitet und Schäden verhindert werden.
Steuerungsmethode
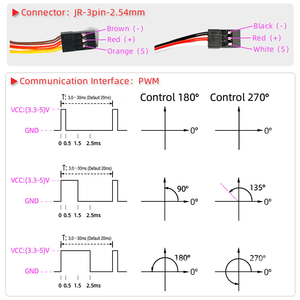
Pulsweitenmodulation ist die Technik, die zur Steuerung der meisten Servos verwendet wird. Die Breite des gesendeten Pulses bestimmt die Position des Servos. Einige Servos verwenden I2C oder serielle Steuerung für präzisere Bewegungen.
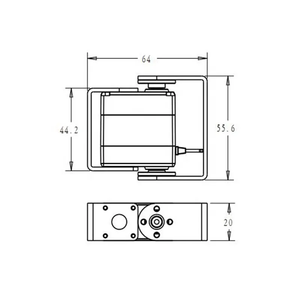
Montage und Integration
Das Design des Projekts bestimmt, wie das Servo montiert und integriert wird. Dazu gehören Halterungen, Zahnräder und andere Komponenten. Der Servo sollte einfach zu montieren und mit anderen Teilen zu verbinden sein.
Kosten und Budget
Das Budget für das Projekt beeinflusst die Wahl des Servos. Servomotoren mit hohem Drehmoment und hoher Präzision sind teurer. Daher sollten Sie ein Gleichgewicht zwischen Kosten und Leistung finden.
Von Arduino gesteuerte Servos umfassen:
Arduino-gesteuerte Servos zeichnen sich durch folgende Eigenschaften aus:
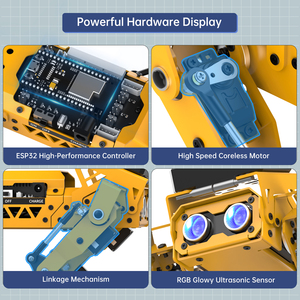
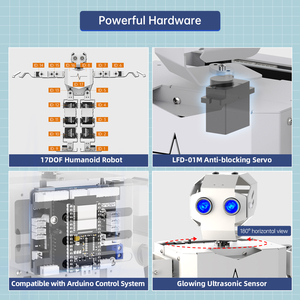
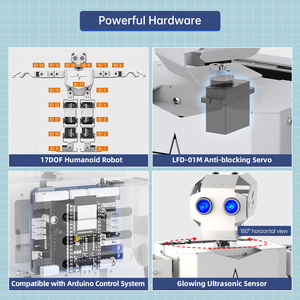
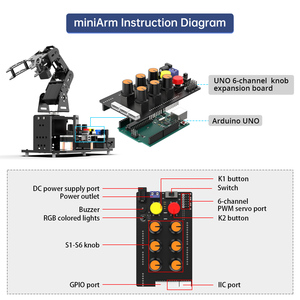
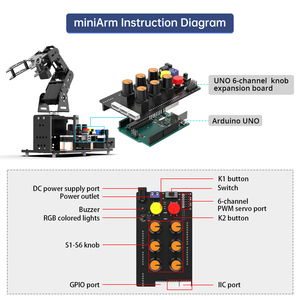
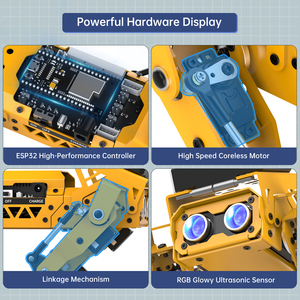
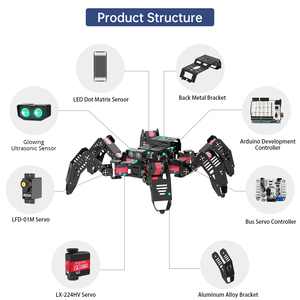
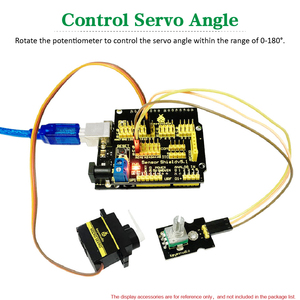
Das Grunddesign eines Servomotors besteht aus einem Motor, einem Getriebe, einem Potentiometer und einer Steuerschaltung. Der Motor initiiert die Drehung, während das Getriebe das Drehmoment erhöht und die Geschwindigkeit verringert. Das Potentiometer ist für die Positionsrückmeldung zuständig, und die Steuerschaltung stellt sicher, dass die Position des Servos präzise gesteuert wird. Die Arduino-Platine ist so konzipiert, dass sie den Servomotor über eine einfache Dreileiterverbindung steuert. Die Steuerleitung sendet das PWM-Signal, während die Strom- und Masseleitung Strom liefern und einen Rückweg für den Strom bereitstellen. Die Arduino-Platine kann mehrere Servomotoren steuern, indem sie eine spezielle Bibliothek verwendet.
Bei der Verwendung von Arduino-gesteuerten Roboter-Servos ist es wichtig, bestimmte Sicherheitsmaßnahmen zu befolgen, um Unfälle und Schäden zu vermeiden. Hier sind einige gängige Sicherheitsvorkehrungen:
Strom ausschalten
Schalten Sie immer die Stromversorgung des Servos und des gesamten Arduino-Systems aus, bevor Sie das Servo anschließen oder abziehen.
Verbindungen prüfen
Stellen Sie sicher, dass alle Verbindungen sicher und korrekt sind, und überprüfen Sie die Verkabelung und Stecker, bevor Sie das System einschalten.
Richtige Spannung
Stellen Sie sicher, dass die Servos mit der richtigen Spannung betrieben werden.
Überstromschutz
Verwenden Sie eine strombegrenzende Vorrichtung wie eine Sicherung oder einen Leitungsschutzschalter, um die Servos und Arduino vor Überstromsituationen zu schützen.
Sichere Montage
Montieren Sie das Servo und das gesamte System sicher, um zu verhindern, dass es herunterfällt oder beschädigt wird.
Freier Arbeitsbereich
Halten Sie den Arbeitsbereich sauber und ordentlich und entfernen Sie alle Gegenstände, die zu Unfällen führen könnten.
Bei der Beurteilung der Qualität von Arduino-Roboter-Servos sollten mehrere Schlüsselfaktoren berücksichtigt werden, um sicherzustellen, dass sie die Anforderungen des Projekts erfüllen. Hier sind einige wichtige Punkte, die Sie berücksichtigen sollten:
Drehmoment
Berücksichtigen Sie die Drehmomentspezifikation des Servos, die seine Fähigkeit angibt, Lasten zu bewältigen. Wählen Sie ein Servo mit ausreichend Drehmoment, um ein Blockieren zu verhindern.
Geschwindigkeit
Überprüfen Sie die Geschwindigkeitsspezifikation des Servos, die bestimmt, wie schnell es sich in eine bestimmte Position bewegen kann. Die Geschwindigkeit ist entscheidend für Anwendungen, die schnelle Reaktionen erfordern.
Präzision
Schauen Sie sich die Präzision und Auflösung des Servos an. Servos mit hoher Auflösung bieten eine präzisere Positionierung und sanftere Bewegungen.
Haltbarkeit
Die Haltbarkeit des Servos ist wichtig, insbesondere für Anwendungen mit hohen Belastungen oder häufigem Gebrauch. Metallgetriebe sind haltbarer als Kunststoffgetriebe.
Rückkopplungsmechanismus
Berücksichtigen Sie die Art des Rückkopplungsmechanismus, der vom Servo verwendet wird. Einige Servos verwenden Potentiometer, während andere Encoder für eine genauere Positionserfassung verwenden.
Leistungsaufnahme
Beurteilen Sie die Leistungsaufnahme des Servos, da dies die Gesamtleistungsanforderungen des Projekts beeinflusst. Eine geringere Leistungsaufnahme ist für batteriebetriebene Anwendungen vorzuziehen.
F. Was sind die Vorteile von Arduino in der Robotik?
F. Was sind die Vorteile von Arduino in der Robotik?
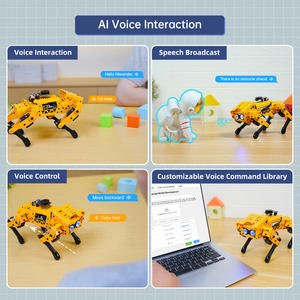
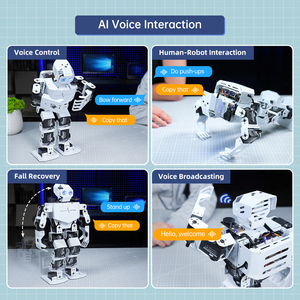
A. Arduino-gesteuerte Servos sind präzise und einfach zu bedienen. Benutzer können sie so programmieren, dass sie sich immer wieder in exakte Positionen bewegen, ohne zu versagen. Dies liegt daran, dass sie eine Positionsrückmeldung verwenden. Ein weiterer Vorteil ist die Einfachheit von Arduino beim Bau von Robotern mit Servomotoren. Arduino-Platinen lassen sich leicht mit Servomotoren verbinden und programmieren.
F. Wie hoch ist die Lebensdauer eines Roboters, der mit Arduino gesteuert wird?
A. Die Lebensdauer eines Arduino-Roboters ist hoch. Er kann bei guter Wartung und Pflege mehrere Jahre lang halten. Die Lebensdauer des Roboters hängt von verschiedenen Faktoren ab, wie z. B. dem Material, aus dem er hergestellt ist, und der Umgebung, in der er arbeitet. Roboter, die aus langlebigen Materialien wie Metall und Kunststoff hergestellt sind, können lange halten. Roboter, die extremen Umgebungen wie extremen Temperaturen und Wasser ausgesetzt sind, werden wahrscheinlich schneller verrotten.
F. Wie werden Arduino und Servomotoren in der Robotik eingesetzt?
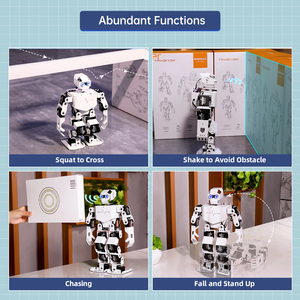
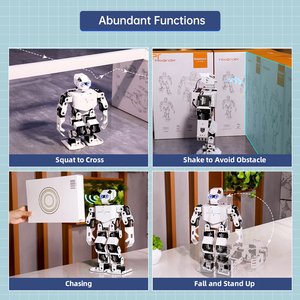
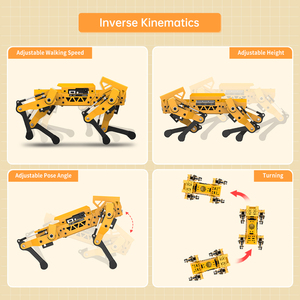
A. Arduino steuert den Servomotor über einen einfachen Code, der auf die Platine geladen wird. Der Code, der an den Motor gesendet wird, sagt ihm, wie weit er sich drehen soll und mit welcher Geschwindigkeit er sich bewegen soll. Das bedeutet, dass der Benutzer den Roboter so programmieren kann, dass er verschiedene Aufgaben ausführt, z. B. vorwärts, rückwärts und seitwärts bewegen. Er kann sich auch an einer bestimmten Stelle drehen oder anhalten. Die Fähigkeit der Arduino-Platine, die Bewegung des Motors zu steuern, macht sie für Anwendungen wie Roboterarme, automatisierte Maschinen und Drohnen geeignet.



















