
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(430 Produkte verfügbar)





 Sofort lieferbar
Sofort lieferbar



 Sofort lieferbar
Sofort lieferbar














 Sofort lieferbar
Sofort lieferbar

































 Sofort lieferbar
Sofort lieferbar
































































 Sofort lieferbar
Sofort lieferbar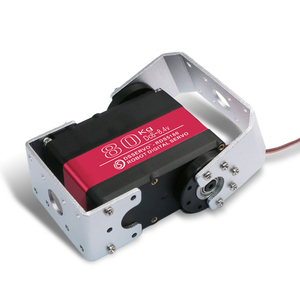



 Sofort lieferbar
Sofort lieferbar





















 Sofort lieferbar
Sofort lieferbar

































 Sofort lieferbar
Sofort lieferbar


 Sofort lieferbar
Sofort lieferbarArduino-Roboter RC-Servos gibt es in verschiedenen Typen, die sich in Design und Funktionalität unterscheiden. Dazu gehören:
Die Auswahl des richtigen Servomotors für den Arduino-Roboter ist entscheidend, da er die Leistung und die Möglichkeiten des Roboters bestimmt. Bei der Auswahl eines Servomotors müssen mehrere Faktoren berücksichtigt werden, wie der Typ des Projekts, Drehmoment, Geschwindigkeit, Präzision, Steuerung und Stromversorgung. Diese Faktoren helfen dabei, einen Servomotor auszuwählen, der den Anforderungen und Bedürfnissen des vorgesehenen Roboters entspricht.
Projekttyp und -umfang
Zuerst muss der Typ des Projekts und der Umfang des Roboters festgelegt werden. Das bedeutet, zu entscheiden, was der Roboter tun soll, seine Größe und sein Gewicht. Dies wird helfen, die entsprechenden Spezifikationen für den Servomotor zu ermitteln. Zum Beispiel, wenn der Roboter dazu gedacht ist, einen stationären Roboterarm zu bauen, könnte ein Hochdrehmoment-Servomotor erforderlich sein. Wenn er dazu gedacht ist, einen gehenden Roboter zu erstellen, könnte ein Servomotor mit kontinuierlicher Rotation geeigneter sein.
Drehmoment
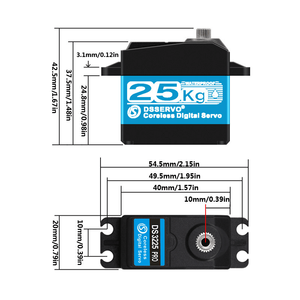
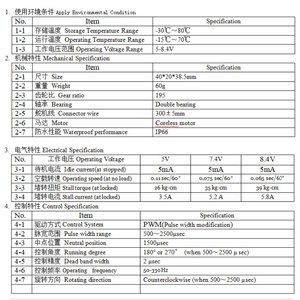
Drehmoment ist die Drehkraft, die der Servomotor erzeugt. Es wird in kg/cm oder Nm gemessen. Drehmoment ist entscheidend beim Bewegen von Lasten oder beim Überwinden von Widerständen. Es sollte ein Servomotor gewählt werden, der genügend Drehmoment hat, um die Last anzuheben. Dies stellt sicher, dass der Roboter seine Aufgaben reibungslos erfüllt, ohne den Motor zu überlasten. Das erforderliche Drehmoment steigt mit dem Gewicht der Last, dem Abstand von der Last zur Drehachse und dem Neigungswinkel.
Geschwindigkeit
Die Geschwindigkeit bezieht sich darauf, wie schnell der Servomotor seine Welle rotieren kann. Sie wird in Grad pro Sekunde gemessen. Die benötigte Geschwindigkeit hängt von den Anforderungen der Anwendung ab. Zum Beispiel ist ein Hochgeschwindigkeitsservomotor ideal für Anwendungen, die schnelle Bewegungen erfordern, wie bei Rennrobotern. Ein Servomotor mit niedriger Geschwindigkeit eignet sich für Aufgaben, die Präzision erfordern, wie z.B. 3D-Druck.
Präzision und Kontrolle
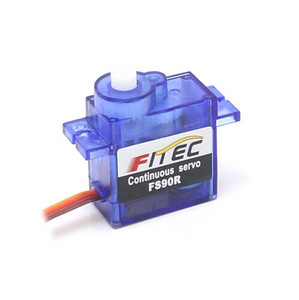
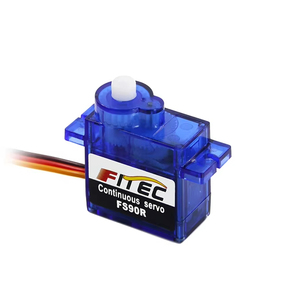
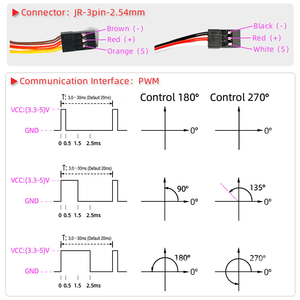
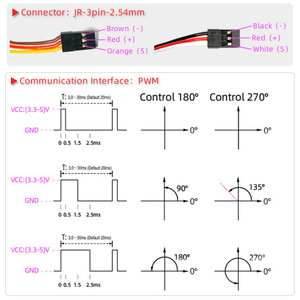
Verschiedene Arten von Servomotoren haben unterschiedliche Grade an Präzision und Kontrolle. Standardservos haben einen begrenzten Bewegungsbereich von 180 Grad und werden durch das Senden eines PWM-Signals gesteuert. Dieses Signal bestimmt die Position des Servoarmes. Sie sind jedoch nicht genau für Anwendungen, die exakte Positionierung erfordern. Servos mit kontinuierlicher Rotation ermöglichen unbegrenzte Rotation, können jedoch keine spezifischen Winkel steuern. Daher sind sie nur für einfache Aufgaben geeignet, wie vorwärts oder rückwärts Bewegung. Um hohe Präzision und Kontrolle zu erreichen, können digitale Servos oder Micro-Servos verwendet werden, die einen größeren Bewegungsbereich, schnellere Reaktionen und eine höhere Auflösung bieten.
Servos sind entscheidend für die Bewegung und Steuerung von mit Arduino gebauten Robotern. Sie werden verwendet, um Körperteile zu bewegen und andere Dinge um den Roboter herum zu steuern, um die Funktionalität des Roboters zu verbessern. Sie sorgen auch dafür, dass der Roboter seine vorgesehenen Aufgaben effizient ausführen kann.
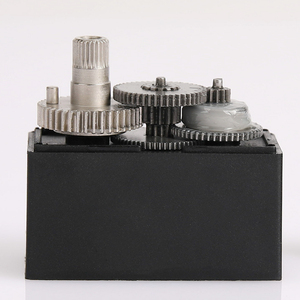
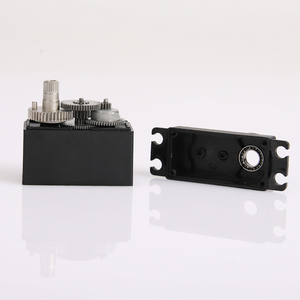
Servos sind mit verschiedenen Funktionen ausgestattet, die sie ideal für den Einsatz mit Arduino-Robotern machen. Sie haben Zahnräder, die den Bewegungsübergang vom Motor zum Roboter verbessern. Außerdem verfügen sie über ein Regelungssystem, das sicherstellt, dass die Position des Roboters entsprechend den Anforderungen gehalten wird. Darüber hinaus sind die meisten Servos mit einem Mikrokontroller ausgestattet, der ihnen hilft, die erforderliche Position aufrechtzuerhalten, selbst wenn äußere Kräfte auf sie wirken. Sie verfügen auch über eine Halterung, die den Servo an Ort und Stelle hält, wenn er an einem Roboter montiert ist.
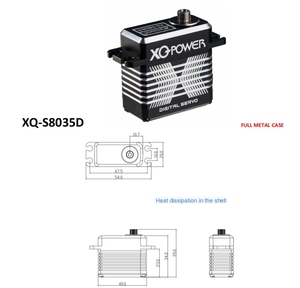
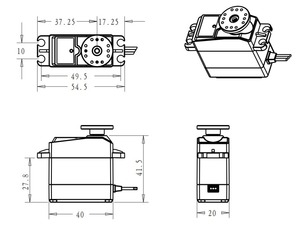
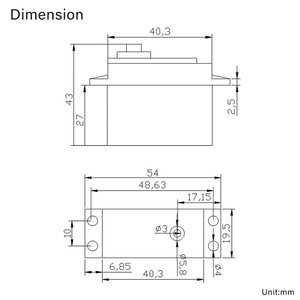
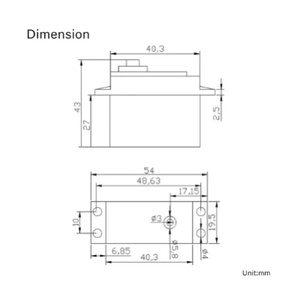
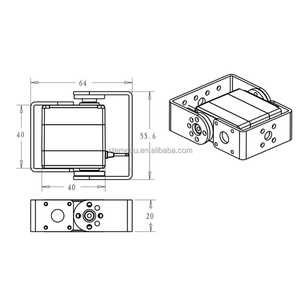
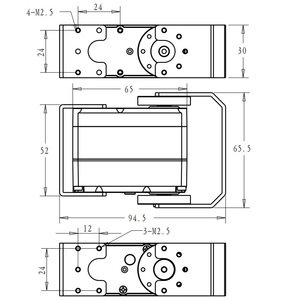
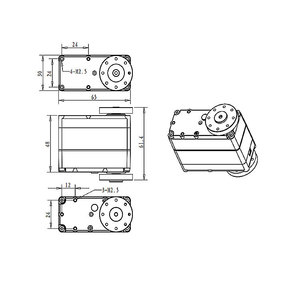
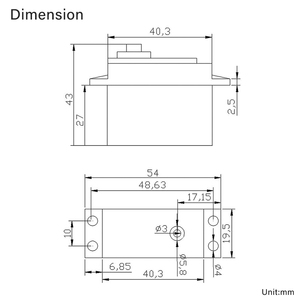
Servos sind so konzipiert, dass sie gut und effizient funktionieren, wenn sie an einem Arduino-Roboter montiert sind. Das Design umfasst eine kompakte Größe, die es ihnen ermöglicht, gut in kleine Roboter zu passen, wo der Platz begrenzt ist. Servos sind auch mit einer Halterung ausgestattet, die den Servo an Ort und Stelle hält, wenn er an einem Roboter montiert ist. Dies verhindert, dass der Servo während des Betriebs wackelt oder sich lockert. Darüber hinaus schützt das Gehäuse des Servos die internen Komponenten vor Staub und anderen Partikeln, die den Servo beschädigen könnten.
Welche Rolle spielt der Arduino bei der Steuerung von RC-Servomotoren?
Das Arduino-Board ist entscheidend, um die RC-Servomotoren zu steuern. Es sendet präzise Puls-signale basierend auf der gewünschten Position des Servos. Die Breite des Pulses bestimmt, ob sich der Servo nach links oder rechts drehen soll.
Wie kann man das Arduino und den RC-Servomotor mit Strom versorgen?
Es ist möglich, entweder eine Batterie oder ein Netzteil zu verwenden, um das Arduino-Board mit Strom zu versorgen. Die verwendete Stromquelle sollte den Spezifikationen der Spannungseingaben des Boards entsprechen. Für eigenständige Anwendungen kann das Arduino mit derselben Batterie versorgt werden, die auch für den RC-Servomotor verwendet wird.
Was sind die häufigsten Anwendungen von Arduino-gesteuerten RC-Servos?
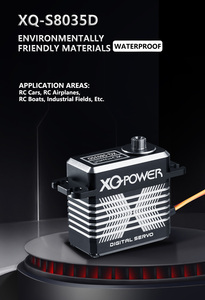
Arduino-gesteuerte RC-Servos werden häufig in Robotern eingesetzt, wie z.B. in Roboterarmen, dreidimensionalen (3D) Druckern und Verkaufsautomaten. Weitere häufige Einsatzgebiete von Arduino-gesteuerten RC-Servos sind Fernbedienungsfahrzeuge, CNC-Maschinen und Heimautomatisierungssysteme.
Was sind die Vorteile der Verwendung von Arduino mit RC-Servos?
Arduino-Boards sind flexibel und kostengünstig, wenn sie mit RC-Servos kombiniert werden. Sie ermöglichen einfaches Programmieren und Anpassen, sodass Benutzer einzigartige und komplexe Steuersysteme für verschiedene Anwendungen entwickeln können, von Robotern bis hin zu fernbedienbaren Geräten.



















