Einführung in open-source Quadcopter-Flugsteuerungen
Die open-source Quadcopter-Flugsteuerung stellt einen bedeutenden Fortschritt in der Welt der Drohnentechnologie dar. Diese vielseitigen Steuerungen ermöglichen es Hobbyisten, Entwicklern und Fachleuten, die Leistung ihrer Drohnen anzupassen und zu verbessern, und bieten unvergleichliche Flexibilität sowie innovative Funktionen. Durch die Nutzung gemeinschaftlich entwickelter Software und Kooperationen können die Nutzer auf ein umfangreiches Ökosystem von Ressourcen und Verbesserungen zugreifen, die auf ihre spezifischen Bedürfnisse abgestimmt sind.
Arten von open-source Quadcopter-Flugsteuerungen
Im Bereich der open-source Quadcopter-Flugsteuerungen gibt es verschiedene Typen, die unterschiedlichen Vorlieben und Fähigkeitsstufen gerecht werden:
- MultiWii: Bekannt für seine Einfachheit und Benutzerfreundlichkeit ist MultiWii perfekt für Anfänger, die in die Quadcopter-Technologie eintauchen möchten.
- PX4: Eine hochgradig modulare Plattform, die PX4 unterstützt eine Vielzahl von Fahrzeugtypen, einschließlich Multikoptern, Tragflügel- und sogar VTOL-Drohnen.
- ArduPilot: Bekannt für seinen umfangreichen Funktionsumfang unterstützt ArduPilot eine große Vielfalt von Fahrzeugen und Missionsplanungsfunktionen, was es bei erfahrenen Piloten beliebt macht.
- Betaflight: Speziell für Racing-Drohnen entwickelt, betont Betaflight anpassbare Parameter und schnelle Reaktionszeiten für wettbewerbsfähiges Fliegen.
Anwendungen von open-source Quadcopter-Flugsteuerungen
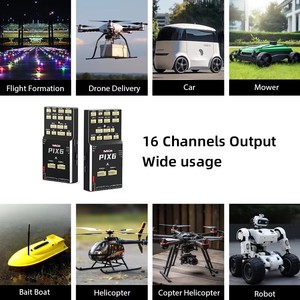
Die open-source Quadcopter-Flugsteuerung wird in verschiedenen Anwendungen weit verbreitet, was ihre Anpassungsfähigkeit hervorhebt:
- Luftbildfotografie: Nutzer können problemlos Kameras und Stabilisierungseigenschaften integrieren, um atemberaubende Luftaufnahmen zu machen.
- Forschung und Entwicklung: Ingenieure und Entwickler nutzen diese Steuerungen für das Prototyping und Testen neuer Drohnentechnologien.
- Rennen: Mit schnellen Reaktionszeiten und Agilität sind sie ideal für Rennsportbegeisterte, die wettbewerbliche Vorteile suchen.
- Agri-Tech: Drohnen, die mit diesen Steuerungen ausgestattet sind, sammeln wertvolle Daten für die landwirtschaftliche Überwachung und das Ernte-Management.
Eigenschaften und Vorteile von open-source Quadcopter-Flugsteuerungen
Open-source Quadcopter-Flugsteuerungen sind mit bemerkenswerten Eigenschaften ausgestattet, die sie von anderen abheben:
- Anpassungsfähigkeit: Nutzer können den Code anpassen, um spezifische Bedürfnisse zu erfüllen und einzigartige Flugerlebnisse sowie Funktionen zu schaffen.
- Gemeinschaftsunterstützung: Aktive Nutzer-Communities teilen Ressourcen, Tutorials und Firmware-Updates, um sicherzustellen, dass die Nutzer über die neuesten Entwicklungen informiert bleiben.
- Kosteneffizienz: Open-source-Plattformen sind oft kostengünstiger im Vergleich zu proprietären Lösungen, was sie einem breiten Nutzerkreis zugänglich macht.
- Verbesserte Leistung: Kontinuierliche Zusammenarbeit führt zu fortwährenden Verbesserungen in der Flugstabilität, Reaktionsfähigkeit und Reichweite, die traditionelle Flugsteuerungen übertreffen.